基于激光+视觉+IMU+RTK的三维重建
 2021年12月11日 12:49
2021年12月11日 12:49三维重建主要通过使用相关仪器来获取物体的二维图像或三维点云等数据信息, 然后, 再对获取的数据信息进行分析处理, 最后, 利用三维重建的相关理论重建出真实环境中物体表面的轮廓信息,广泛应用于人工智能、机器人、无人驾驶、SLAM (Simultaneous localization and mapping)、虚拟现实和 3D 打印等领域, 具有重要的研究价值也是未来发展的重要研究方向。
三维重建技术分类如下图所示
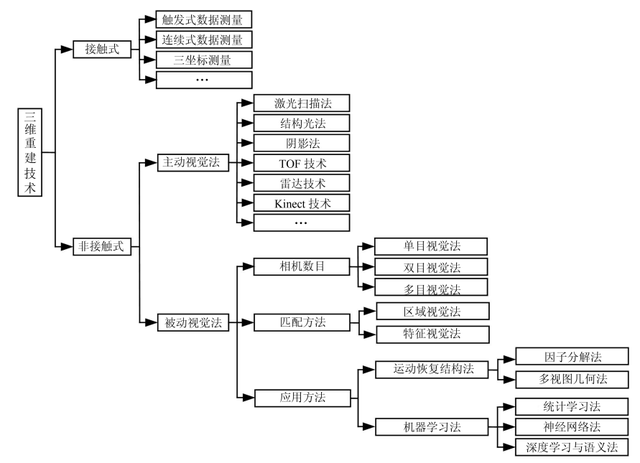
三维重建技术分类
目前三维重建方法较多,但主要聚焦在激光和视觉,因为二者能输出较出色的重建效果,激光和视觉重建的效果又有一些差异:
激光重建精度较高,不受光线影响,但是不具有颜色属性。
视觉重建精度一般,具有颜色属性,但效果易受光线影响。
无论是激光和是视觉做三维重建都需要做特征匹配,但是匹配都不能保证精度足够,在一些特征不好的时候,建图的效果较差,所以一般会加入IMU做匹配约
束,IMU传感器能智能地融合多轴陀螺仪和加速度计,即只用内部传感器就可以得到测量数据,而不需要任何外界帮助,提供可靠的位置和运动识别。
IMU在三维重建中采用的方法一般是通过卡尔曼滤波器或者优化的预积分模型进行对匹配进行相对约束,能大大提升匹配的精度和鲁棒性。
基于滤波的IMU融合框架如下图所示
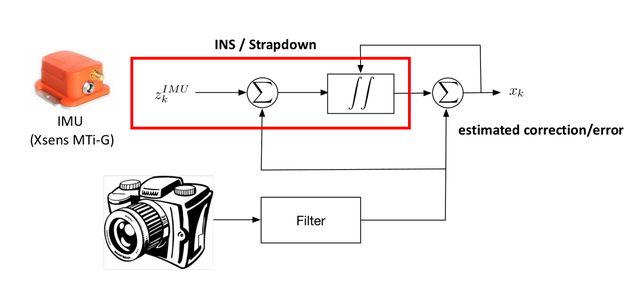
基于滤波的IMU融合
基于优化的IMU融合如下图所示

基于优化的IMU融合
两种融合方式都有其应用的优点,基于滤波的计算量小,基于优化的计算两较大,精度一般高于滤波方法。
激光三维重建的匹配原理如下图所示
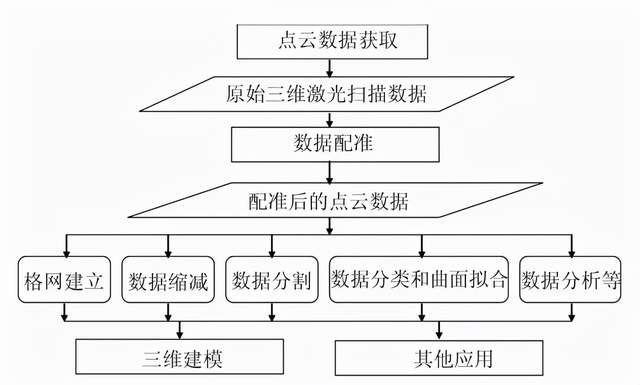
激光三维重建过程
激光匹配的本质就是对应点关联,做刚体变换完成,典型算法是ICP,NDT。
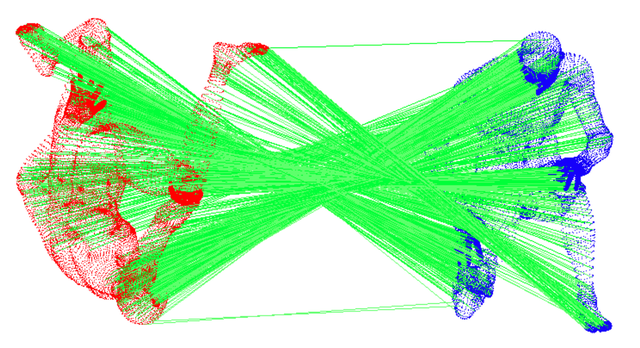
激光匹配的对应点关联
视觉三维重建的匹配原理如下图所示
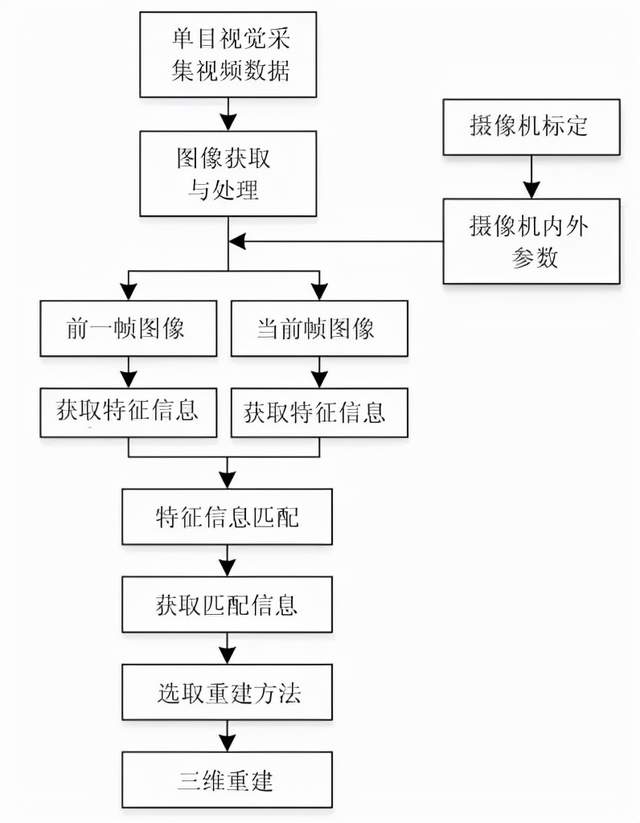
视觉三维重建过程
视觉匹配的本质就是利用多帧图像的共视关系恢复目标的三维结构,典型方法就是BA。
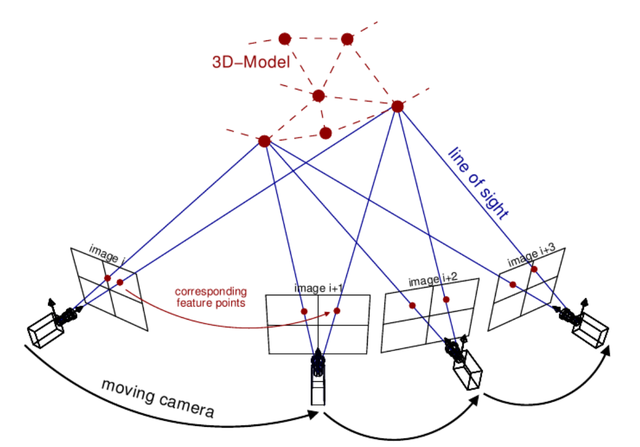
视觉匹配的多视角共视约束
激光三维重建效果
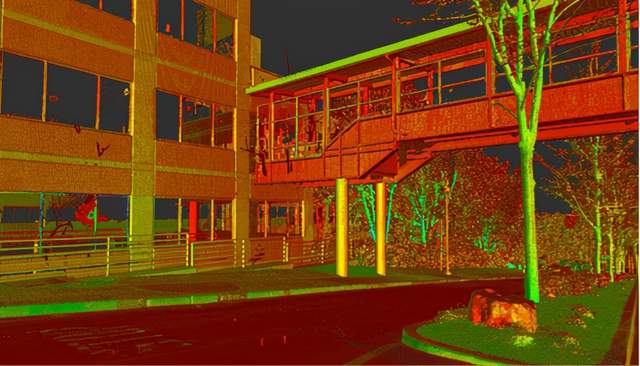
激光三维重建高精度地图1
激光三维重建高精度地图2
视觉重建效果图
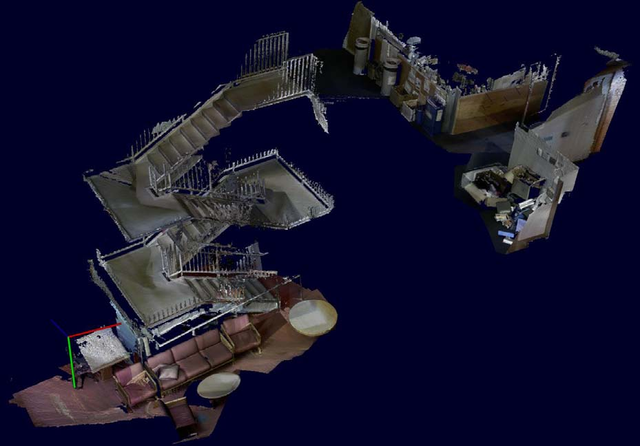
视觉三维重建地图,带有颜色属性
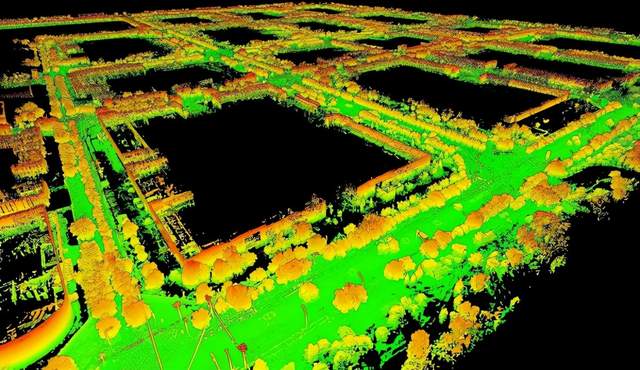
纯激光或者视觉+IMU在大场景中可能会有一定累计误差漂移情况,对此,加入RTK可消除累积误差,适合进行大场景三维重建,效果如下图所示。
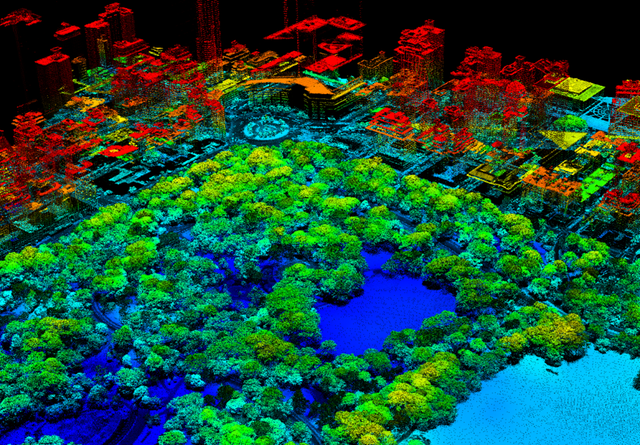
激光+视觉+IMU+RTK重建效果图
最后,有相关需求欢迎通过微信公众号联系我们。






















工程师必备
- 项目客服
- 培训客服
- 平台客服
TOP




