【技术贴】使用VSM™实现车辆操稳的精准控制
 2022年8月2日 15:02
2022年8月2日 15:02浏览:8813
随着汽车市场竞争的加剧,消费者在选择汽车产品时愈来愈关注车辆的驾乘品质及行驶安全。对于车辆操稳性能的开发来讲,通过对驱动轮驱动扭矩的控制来改善车辆的操纵稳定性一直是研发的热点,其中限滑差速器和近年流行的扭矩矢量控制(Torque Vectoring)技术的使用可以在不损害车辆的驾驶乐趣的前提下有效的提高车辆的行驶稳定性。
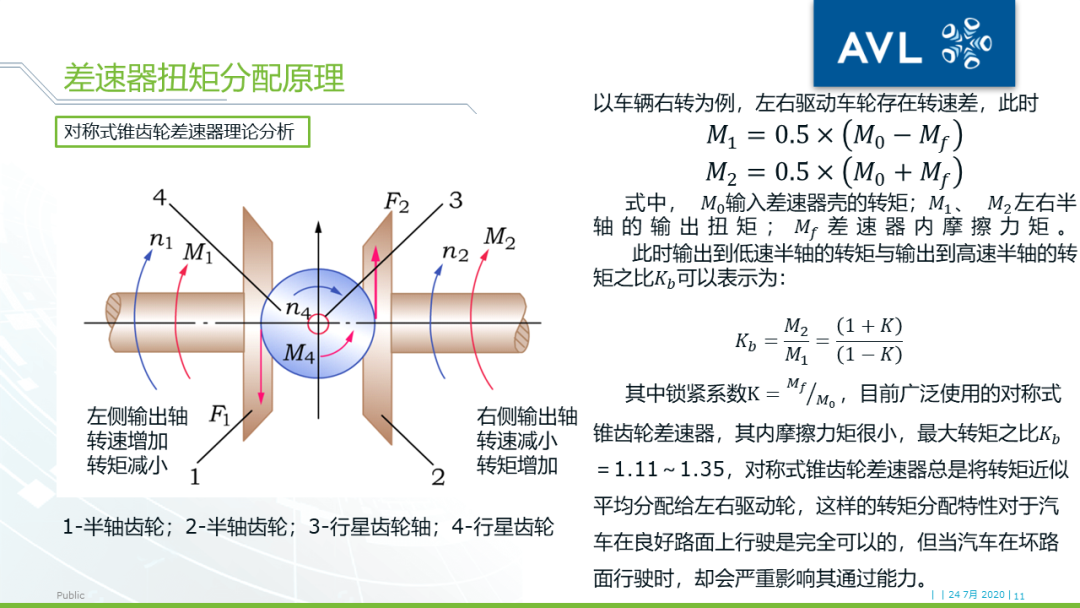
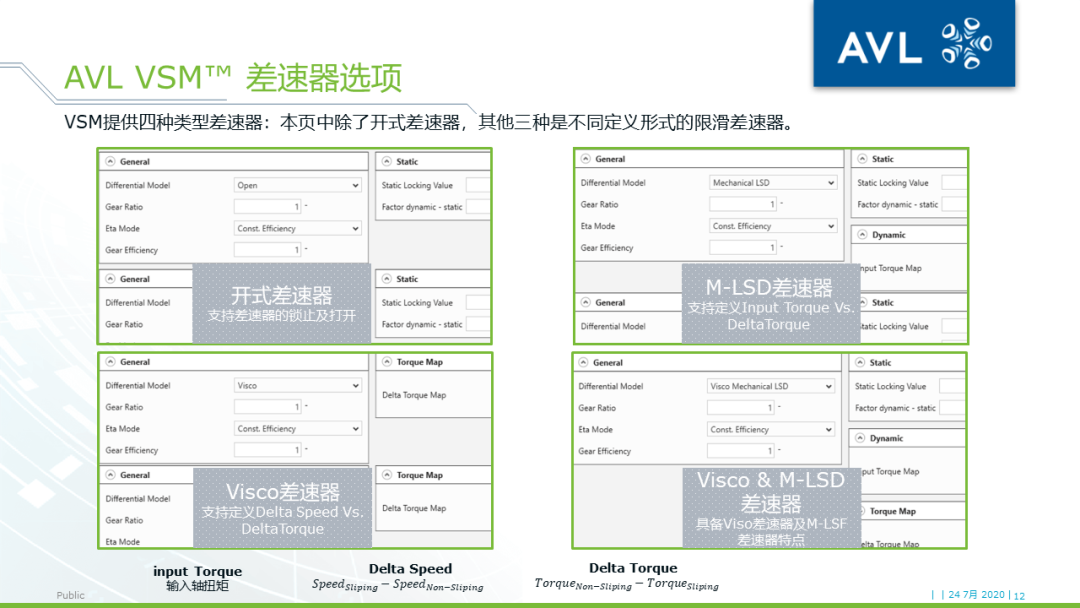
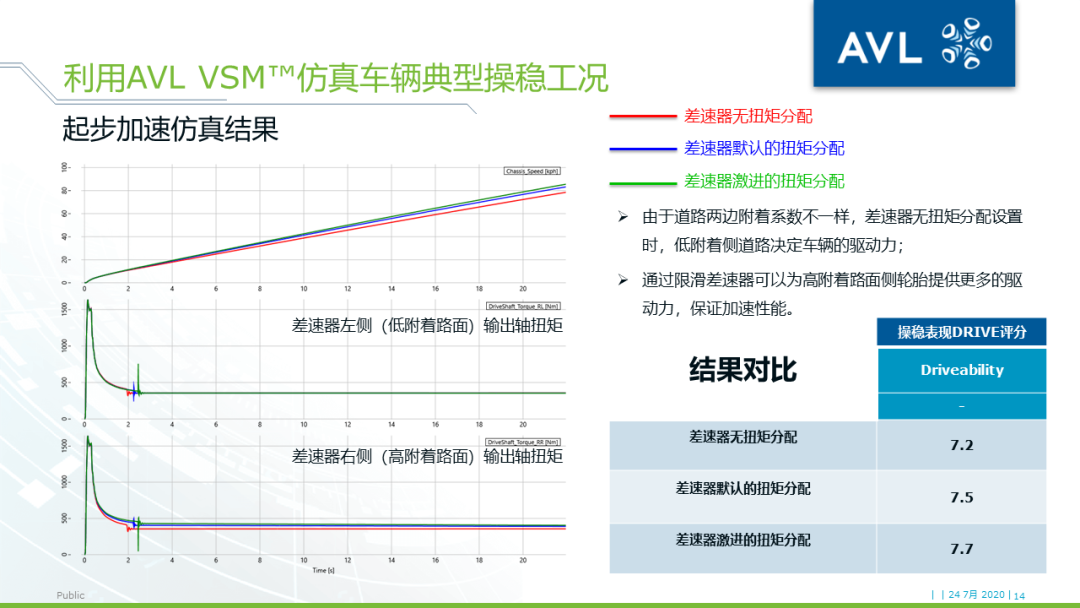
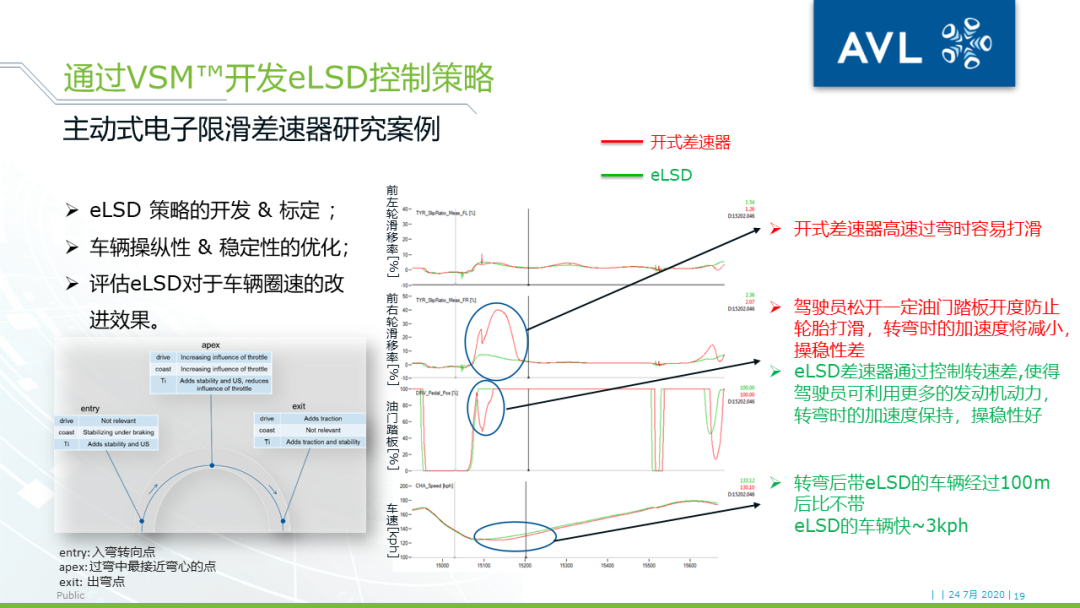
限滑差速器相比于普通差速器,依靠自身结构特点,改变普通差速器的扭矩分配特性。当安装限滑差速器的汽车行驶在左、右附着系数不相等的路面上时,处在低附着系数路面上的驱动车轮就比较容易出现空转打滑,在此情况下,限滑差速器通过自身特殊的结构,使处在较高附着系数路面的驱动车轮获得更大的驱动力,从而使汽车重新获取动力,增强汽车的通过性以及更好的驾驶体验;同时随着汽车电子的发展,具有主动控制功能的差速器(eLSD)被越来越多的厂商开始接受,主动差速器能够根据车辆运行工况及路面状态,主动分配驱动轮上的驱动力矩,充分利用驱动车轮与路面间的附着条件,能够有效提高车辆动力性、通过性及操纵稳定性。
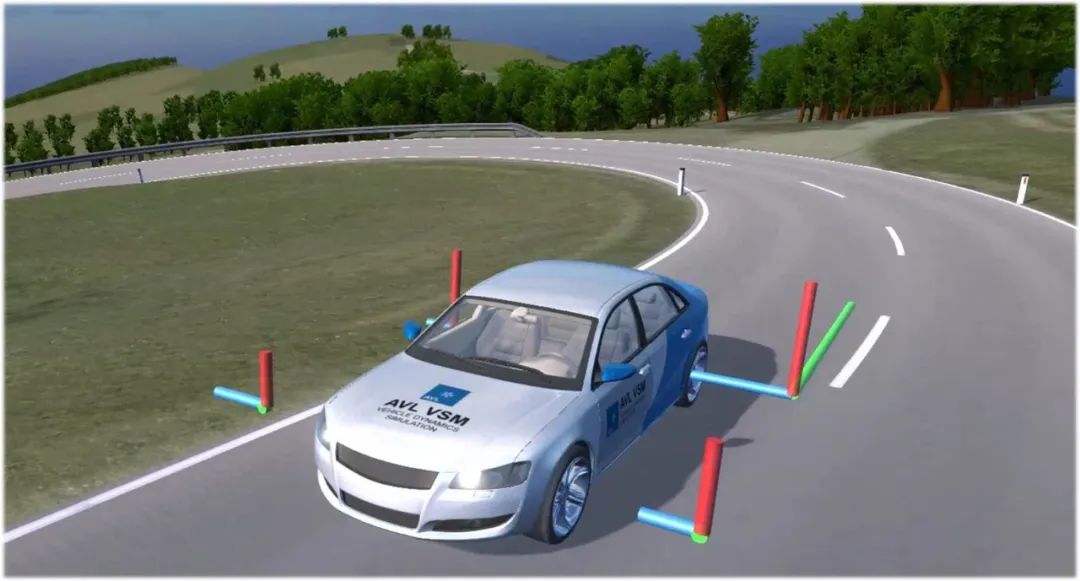
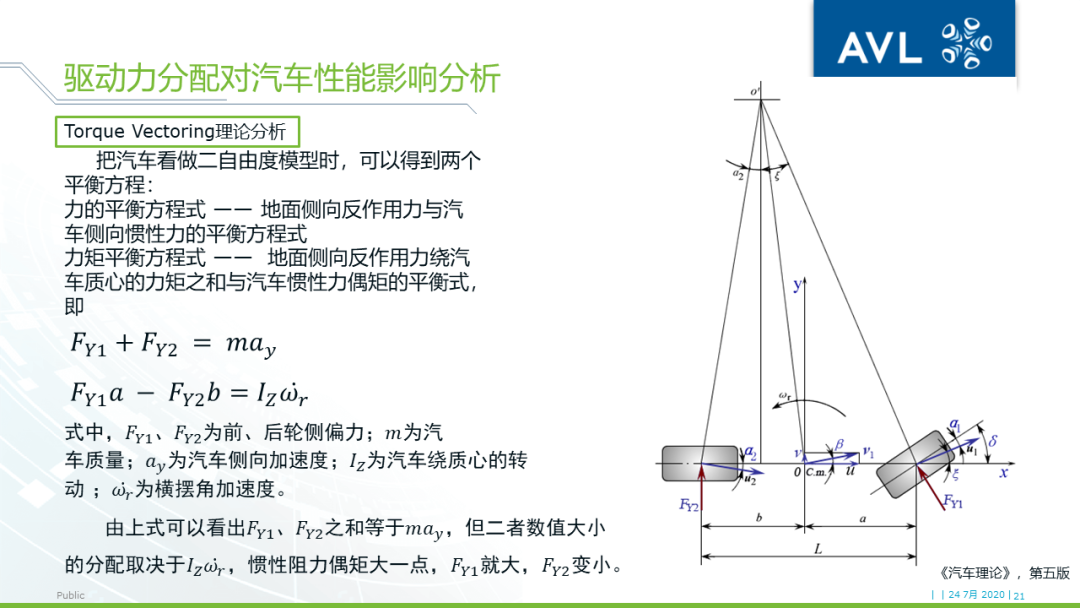
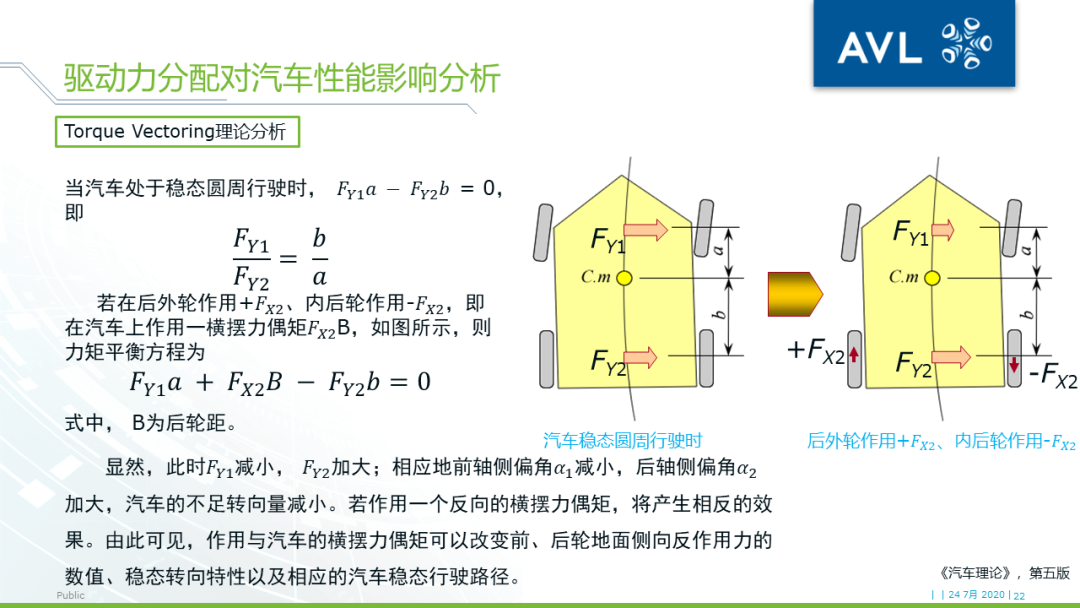
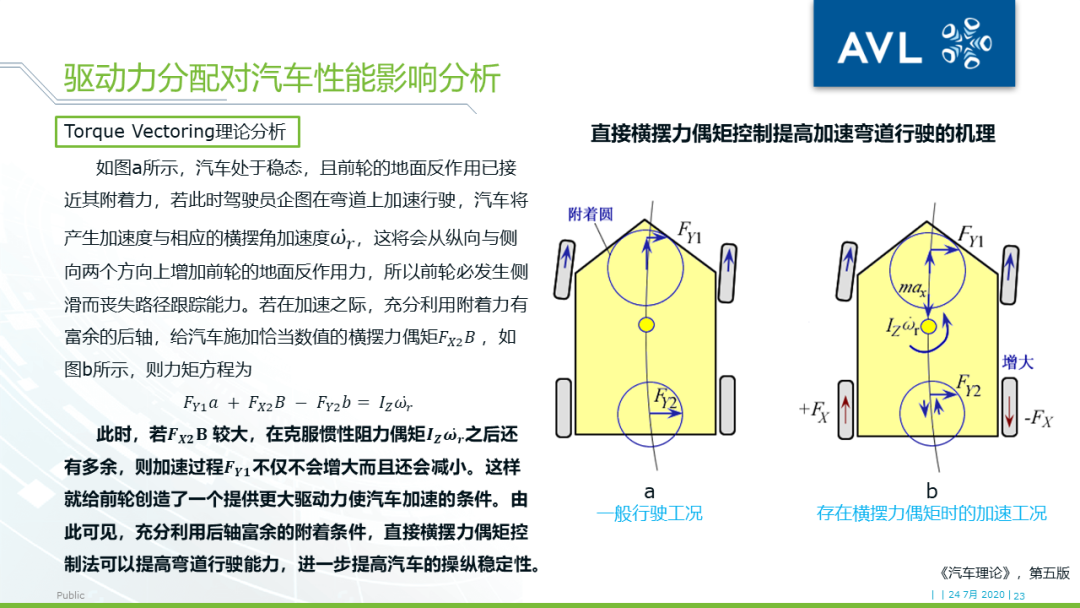
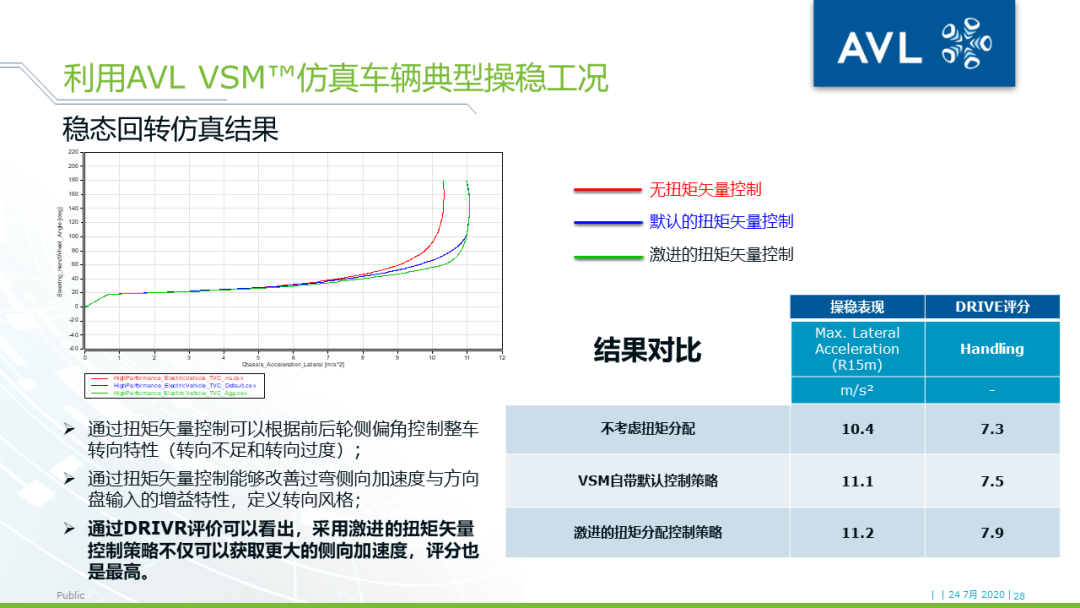
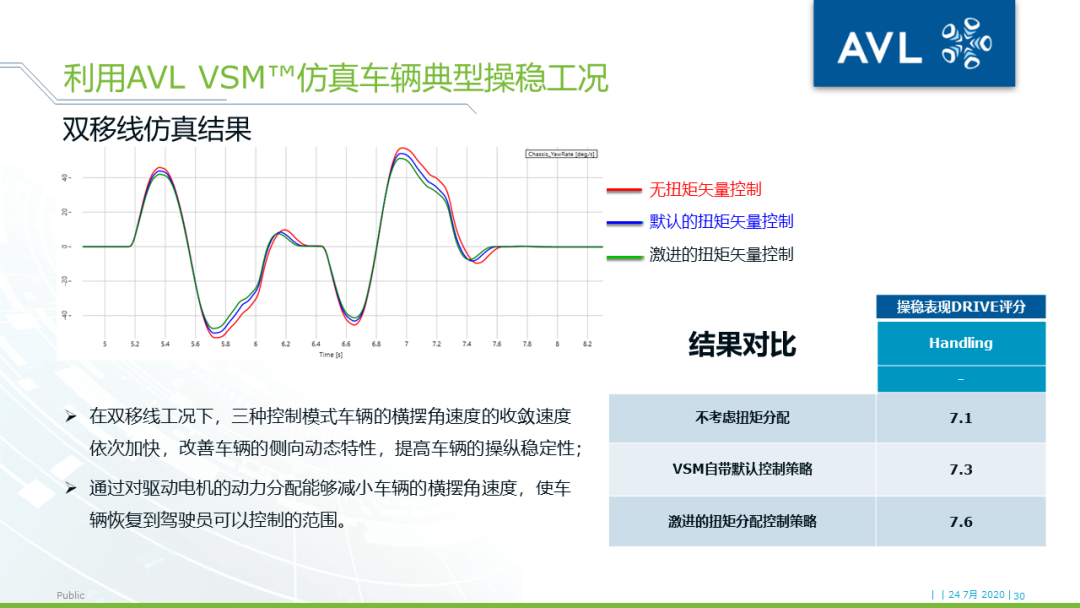
在车辆过弯行驶过程中,通过电机驱动控制改变内外侧驱动力,产生横摆力偶矩,进一步提高汽车的操纵稳定性,这种在动态行驶中调节单个车轮力的控制功能通常称为扭矩矢量(Torque Vectoring)控制,采用该技术在保证车辆高速转弯行驶的安全性的同时,可以减少传统通过制动力参与调节车辆稳定性而带来的能量损失及制动系统的磨损。
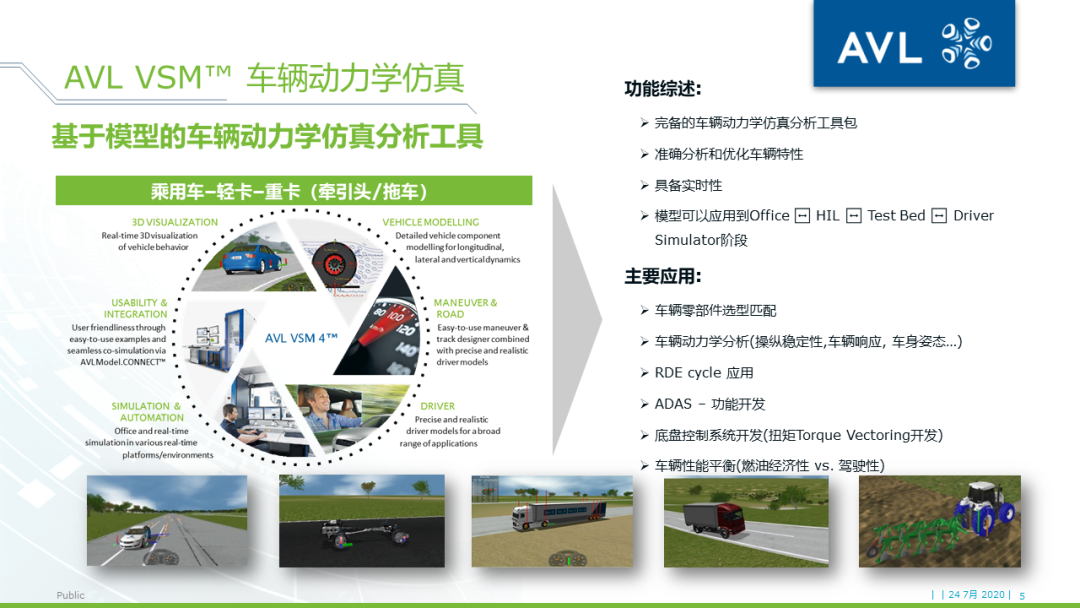
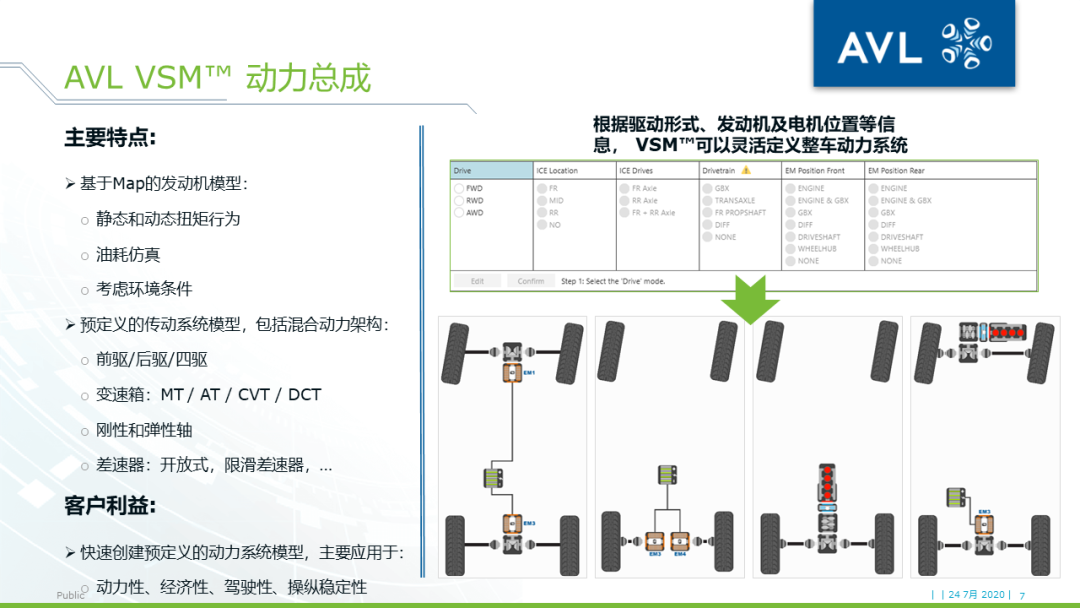
本次技术贴详细介绍AVL
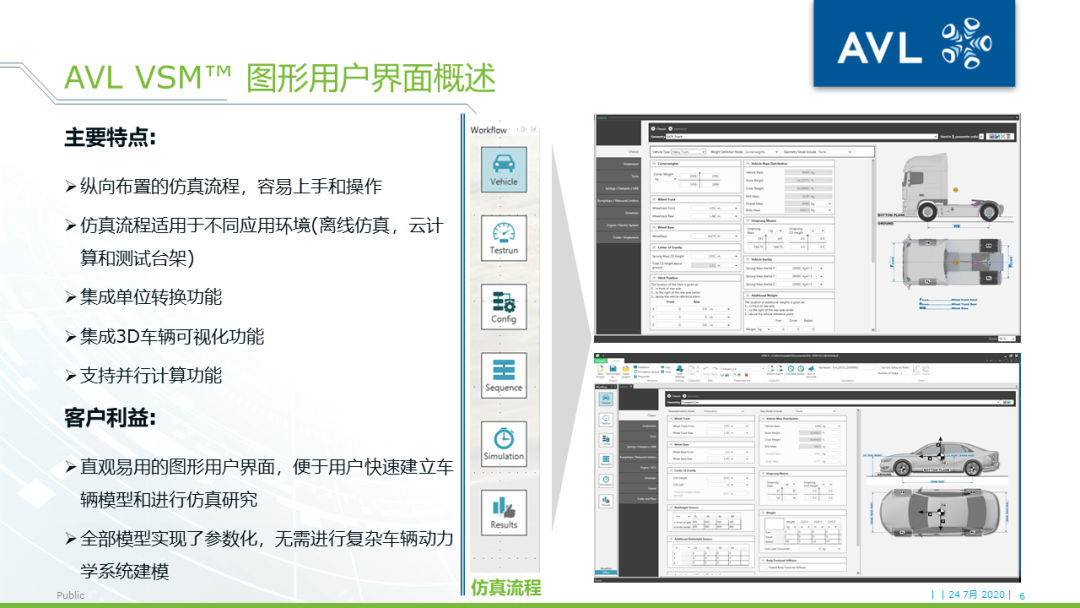
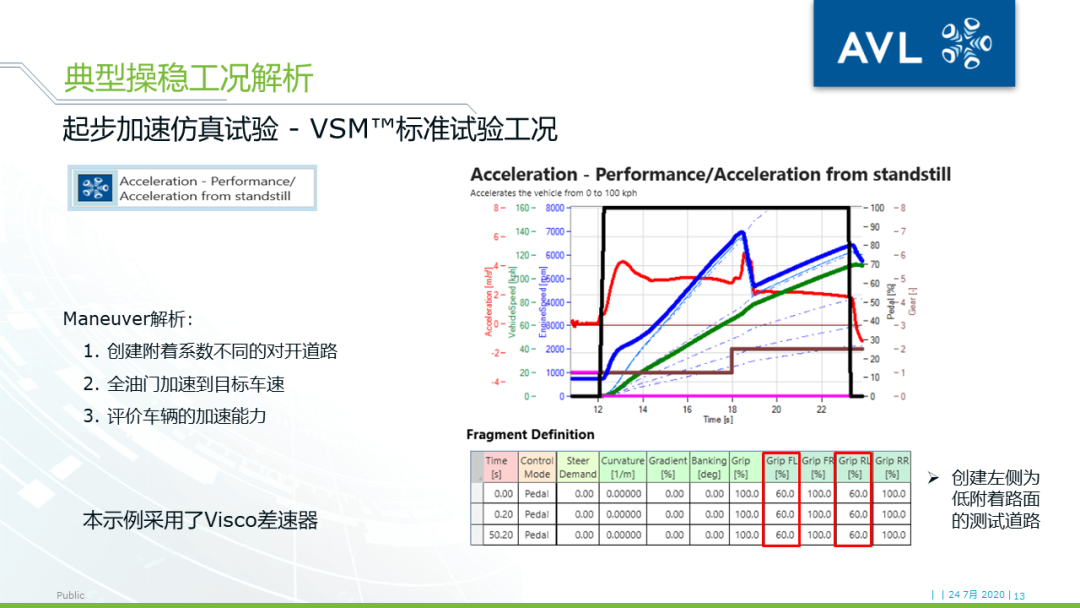
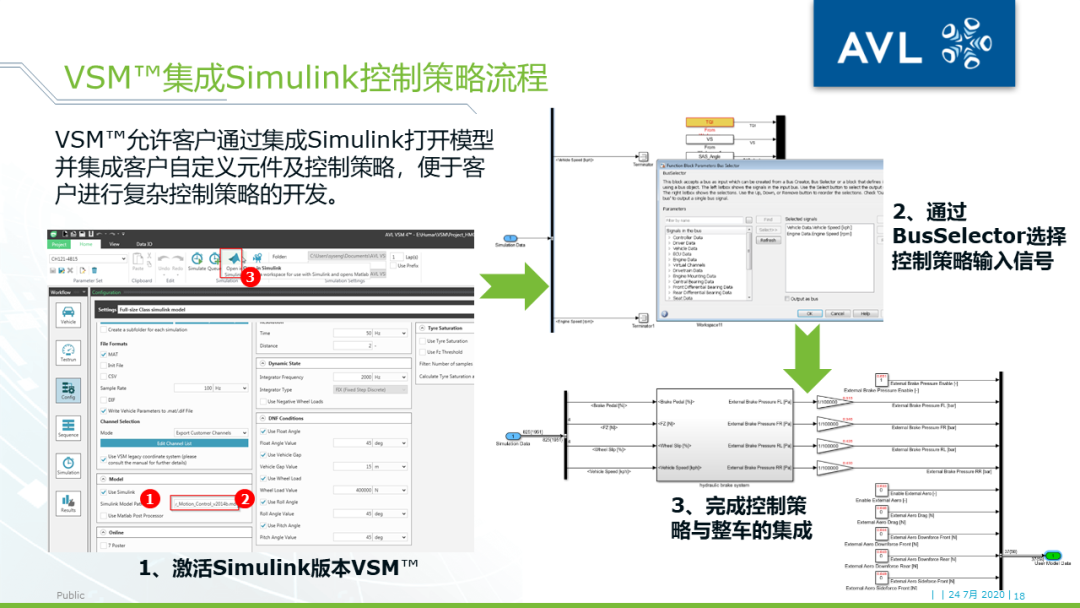
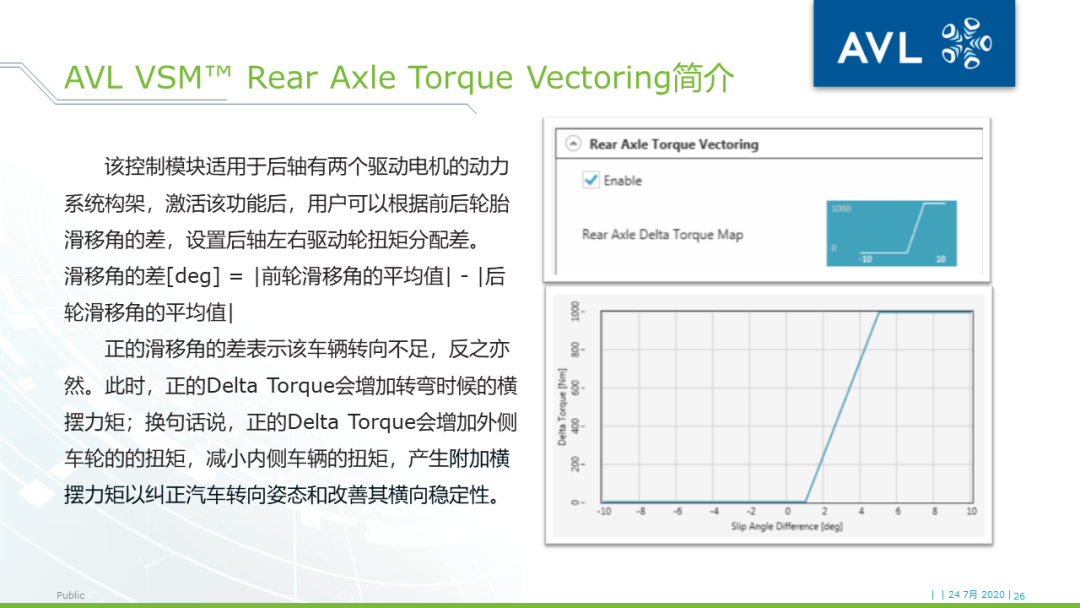
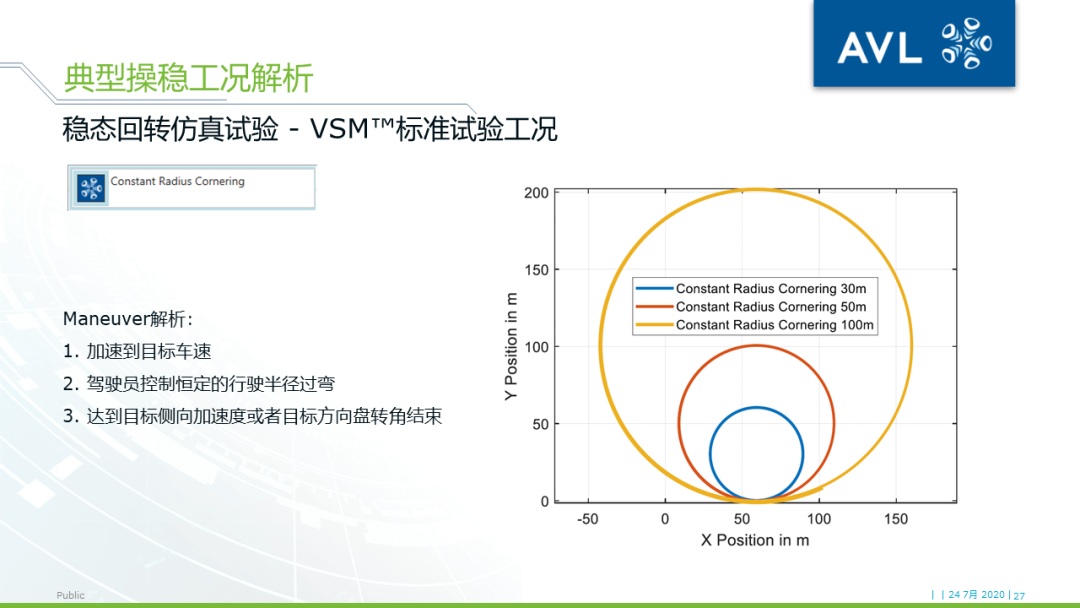
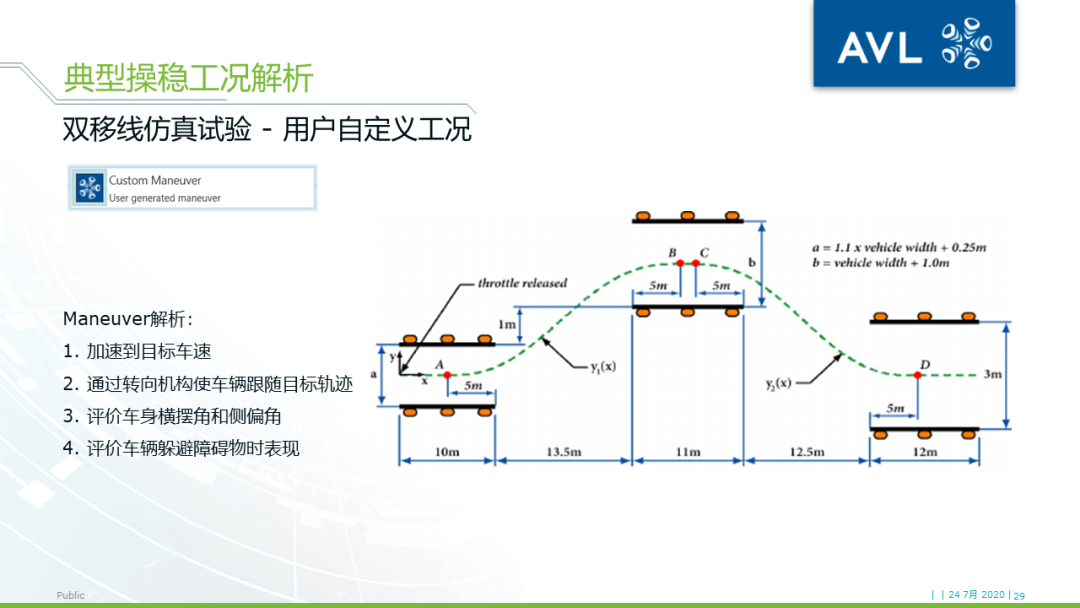
车辆动力学仿真工具 VSM™中限滑差速器和Torque Vectoring的功能及应用场景,首先采用AVL VSM™ 独有的Maneuver Designer创建稳态回转及双移线工况;其次,在AVL VSM™ 通过激活和取消限滑差速器及Torque Vectoring功能,分析其对车辆性能的影响,同时介绍VSM™ 集成Simulink控制策略,完成电子限滑差速器(eLSD)控制策略的开发;最后,结合AVL DRIVE™以客观评分的方式对结果进行验证。











技术邻APP
工程师必备
























