目前,全球范围的智能、自主船舶研究与开发处于快速增长的阶段,中国、日本、韩国、美国、荷兰、挪威、意大利、英国、芬兰、法国、德国、澳大利亚等国家及技术开发商等展开大量研究,目标攻破关键技术,夺取标准制定权,抢占智能船舶、自主化船舶市场。
目前我国内河船舶运输量稳步增长,但内河航运存在船舶老旧、自动化程度低、船员短缺、素质较低等问题,据统计,70%的船舶事故与驾驶人员在靠离泊过程中的不良船艺有关,这些事故不仅会导致巨大的经济损失,也会造成严重的人员伤亡和环境污染。靠离泊作业过程中,一方面由于低速、浅水、岸壁效应的影响,船舶航行稳定性、操纵响应性变差;另一方面,外界风、流尺度与船舶航行速度处于同一量级,此时船舶水动力表现出强非线性,更易受到外界干扰影响;此外,内河货船的靠离泊作业需要借助桨、舵、侧推器、拖轮等装置的协助实现船舶的掉头、转向、横移、停船等操作,船舶的操控相对复杂,稳定控制难度大,安全风险高。为解决内河货船靠泊过程中出现的问题,降低作业风险,亟待开发一种面向内河货船的新型、安全、高效的靠泊作业技术及方法。
近年来,国际海事组织和各大船级社相继提出了关于自动靠离泊技术的规范和要求,日本、韩国和欧洲相关企业和机构均在开展靠离泊系统的研究和试验,并取得了大量的研究成果。
2018年,日本国土交通省(MLIT)通过汐路丸(Shioji Maru)号训练研究船,演示自主航行以及自动靠离泊技术,并计划在2025年实现项目的实际应用。2022年,日本商船三井使用沿海集装箱船Mikage进行靠离泊航行测试,使用无人机代替船员,完全实现整个靠泊、系泊过程的自动化,该项目在提高靠离泊过程的安全性、减少船员劳动力需求和降低成本等问题上有显著成果。2020年,韩国智能水面船项目(KASS)联合KRISO、KAIST、韩国海事海洋大学等科技公司及科研院所,计划开展包含辅助/自动靠泊系统及其原型机在内的智能船舶技术研究,目前已取得相当的研究成果。
 ▲ 图1 日本汐路丸(Shioji Maru)号训练研究船自动靠泊 图源/日本MarEx网
▲ 图1 日本汐路丸(Shioji Maru)号训练研究船自动靠泊 图源/日本MarEx网
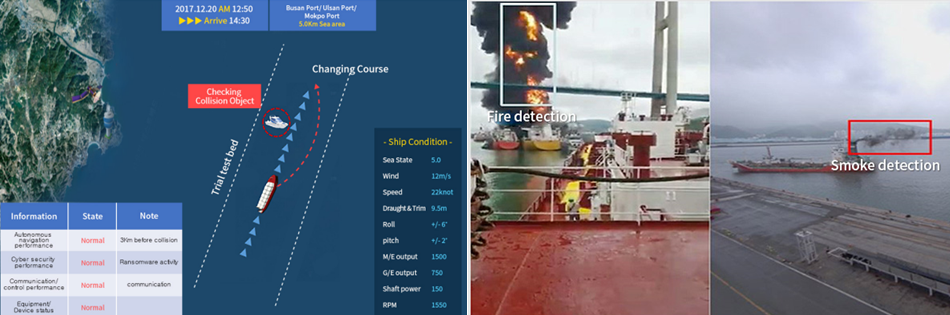 ▲ 图2 韩国智能水面船项目KASS辅助靠离泊 图源/韩国KASS网
2018年,芬兰瓦锡兰科技服务公司依托其Dock-to-Dock智能靠泊项目成果,完成了“Folgefonn”的渡轮在3个港口间的自主航行与自动靠离泊。2018年12月,罗尔斯罗伊斯公司和芬兰国有渡轮运营商Finferries在芬兰图尔库市南部群岛成功展示了世界上第一艘全自动渡船,采用多源传感器及人工智能技术实现船舶航行状态及航行环境感知,利用自动导航系统实现船舶靠离码头时的航线、航速控制,无需人工干预即可完成自动靠离泊。
2021年,挪威Kongsberg与Yara公司合作打造的“YARA Birkeland”号集装箱船在挪威南部进行了12海里的短途自主航行,在Macgregor智能系泊系统协助下,初步实现无人船的靠离泊技术应用。2021年瑞典Volvo Penta公司展示了其靠离泊辅助系统中的动态变量补偿技术及航向保持功能,该靠离泊辅助系统的应用时业界首个全集成辅助靠离泊系统的商业应用。
▲ 图2 韩国智能水面船项目KASS辅助靠离泊 图源/韩国KASS网
2018年,芬兰瓦锡兰科技服务公司依托其Dock-to-Dock智能靠泊项目成果,完成了“Folgefonn”的渡轮在3个港口间的自主航行与自动靠离泊。2018年12月,罗尔斯罗伊斯公司和芬兰国有渡轮运营商Finferries在芬兰图尔库市南部群岛成功展示了世界上第一艘全自动渡船,采用多源传感器及人工智能技术实现船舶航行状态及航行环境感知,利用自动导航系统实现船舶靠离码头时的航线、航速控制,无需人工干预即可完成自动靠离泊。
2021年,挪威Kongsberg与Yara公司合作打造的“YARA Birkeland”号集装箱船在挪威南部进行了12海里的短途自主航行,在Macgregor智能系泊系统协助下,初步实现无人船的靠离泊技术应用。2021年瑞典Volvo Penta公司展示了其靠离泊辅助系统中的动态变量补偿技术及航向保持功能,该靠离泊辅助系统的应用时业界首个全集成辅助靠离泊系统的商业应用。
 ▲ 图3 芬兰瓦锡兰Dock-to-Dock智能靠泊项目 图源/瓦锡兰集团
▲ 图3 芬兰瓦锡兰Dock-to-Dock智能靠泊项目 图源/瓦锡兰集团
 ▲ 图4 瑞典Volvo Penta辅助靠离泊系统 图源/VOLVO PENTA官网
2019年我国无人驾驶自主航行系统试验船“智腾”号正式下水,该船舶具备自主航行控制、自主靠离泊等功能。2021年,由交通运输部水运科学研究院作为技术牵头单位负责的300TEU集装箱商船“智飞”号在青岛开展海上测试,该船是我国首艘具有智能航行能力、面向商业运营的运输货船,也是目前在建的全球吨位最大的智能航行船舶。2021年,舟山引航站、浙江移动舟山分公司与中化兴中石油转运(舟山)有限公司共同打造了“基于5G+MEC大型船舶智慧引航项目”,以大型船舶智慧靠离泊为切入点,搭建统一海上服务平台提供船舶靠离泊、航行、锚泊、监控辅助等功能。
▲ 图4 瑞典Volvo Penta辅助靠离泊系统 图源/VOLVO PENTA官网
2019年我国无人驾驶自主航行系统试验船“智腾”号正式下水,该船舶具备自主航行控制、自主靠离泊等功能。2021年,由交通运输部水运科学研究院作为技术牵头单位负责的300TEU集装箱商船“智飞”号在青岛开展海上测试,该船是我国首艘具有智能航行能力、面向商业运营的运输货船,也是目前在建的全球吨位最大的智能航行船舶。2021年,舟山引航站、浙江移动舟山分公司与中化兴中石油转运(舟山)有限公司共同打造了“基于5G+MEC大型船舶智慧引航项目”,以大型船舶智慧靠离泊为切入点,搭建统一海上服务平台提供船舶靠离泊、航行、锚泊、监控辅助等功能。
 ▲ 图5 中国“智腾”号试验船 图源/广东造船
▲ 图5 中国“智腾”号试验船 图源/广东造船
 ▲图6中国“智飞”号300TEU智能集装箱船 图源/人民网
▲图6中国“智飞”号300TEU智能集装箱船 图源/人民网
 ▲ 图7 中国舟山引航站、浙江移动舟山分公司与中化兴中石油转运(舟山)有限公司“基于5G+MEC大型船舶智慧引航项目” 图源/舟山港航口岸
综上,国外关于船舶自动靠离泊的研究起步较早,在辅助/自动靠离泊技术及系统方面做了大量理论研究,并实现了部分实船测试与应用,一定程度上推动了自动靠离泊技术的发展,具有一定的商业价值。相比之下,国内在靠离泊技术方面的研究大部分高等院校和企业处于理论研究阶段,以小型渡轮、拖轮、试验船、训练船等为载体开展了应用探索与功能测试,还未经实船验证。
综合船舶驱动能力、人-船-岸安全因素以及经济因素,当前法规及码头规范中允许船长在120米以下的中小型非危险品船如集装箱船、滚装船、散货船、客等无需申请领航,依靠本船能力完成自引自靠及系泊作业。据统计,中小型船舶的整个靠泊、系泊过程需要的时间平均为45分钟,在泊位环境、气象水文条件较差时,整个过程持续的时间将会更长。此外,在靠泊时,由于主机不停止工作,螺旋桨不断旋转,长此以往,很可能导致河床土壤松动,增加泊位基底损坏的风险,一方面带来极高的安全隐患,另一方面,在对泊位进行维护时,由于码头或泊位不能用于船舶停靠,也将为码头公司带来巨大的经济损失。
安全保障方面,传统的缆绳系泊方式下,运送系缆绳以及稳固系缆绳的工作人员处于船只与码头/岸基设备之间,这存在很大的安全隐患。此外,对于系泊的小型船只,当周围系泊的大型船只突然启动主机时,这些小船可能会发生碰撞/挤压事故,与此同时,系缆小船的缆绳可能会突然绷断,强大的反作用力可能会对在场的工作人员造成严重的伤害;花费分配方面,船舶自主靠/系泊时产生的费用主要分配在岸端系缆工作人员聘用,运送系缆绳小型船舶租赁,主机常开状态下燃料消耗等方面。
随着科学技术的发展,新型的船舶驱动方式的出现有效地提高了船舶的操纵性及稳定性,自动化、无人驾驶、无人化控制技术的发展促成了无人船、智能船、无缆系泊装置、智能码头的出现,有效保证了船舶靠系泊过程的安全性及经济型,物联网技术有效保证了信息传递的及时性及准确性。但这些技术当前均以单一个体为对象,而船舶的靠系泊过程一个复杂的多对象参与的过程,是靠系船舶、航经船舶、码头之间不断交互的过程,建立一个智能船自主靠系泊船岸协同一体化系统既是技术发展的趋势,也是以绿色、安全、快速、经济为目标的新一代水路交通系统的必要发展需求。
模块化系统具有技术架构清晰、维护成本低、功能界限明确等优点,对于作业流程复杂、参与对象多、控制精度高、安全要求严格的船舶靠离泊作业,构建模块化的船舶自动靠泊系统,是值得发展与推广的。
总地来说,船舶自动靠泊系统可以分为三个模块:船端感知及控制模块,岸基设备感知及控制模块,以及数据交互模块。其中,船端感知及控制模块主要负责环境、本船及他船航行状态感知,船舶靠泊作业决策与航迹、航向、航速规划,船舶低频运动控制等功能;岸基设备感知及控制模块则主要针对岸基无缆系泊设备实现对设备自身、系泊船舶状态以及设备压力等的感知、设备运动及吸附力控制等功能;数据交互模块主要以数据库的形式,在两个控制模块之间进行数据存储及交换,从而实现信息的同步,提高感知精度及控制精度,降低船舶运动及设备控制风险,系统示意图如图所示:
▲ 图7 中国舟山引航站、浙江移动舟山分公司与中化兴中石油转运(舟山)有限公司“基于5G+MEC大型船舶智慧引航项目” 图源/舟山港航口岸
综上,国外关于船舶自动靠离泊的研究起步较早,在辅助/自动靠离泊技术及系统方面做了大量理论研究,并实现了部分实船测试与应用,一定程度上推动了自动靠离泊技术的发展,具有一定的商业价值。相比之下,国内在靠离泊技术方面的研究大部分高等院校和企业处于理论研究阶段,以小型渡轮、拖轮、试验船、训练船等为载体开展了应用探索与功能测试,还未经实船验证。
综合船舶驱动能力、人-船-岸安全因素以及经济因素,当前法规及码头规范中允许船长在120米以下的中小型非危险品船如集装箱船、滚装船、散货船、客等无需申请领航,依靠本船能力完成自引自靠及系泊作业。据统计,中小型船舶的整个靠泊、系泊过程需要的时间平均为45分钟,在泊位环境、气象水文条件较差时,整个过程持续的时间将会更长。此外,在靠泊时,由于主机不停止工作,螺旋桨不断旋转,长此以往,很可能导致河床土壤松动,增加泊位基底损坏的风险,一方面带来极高的安全隐患,另一方面,在对泊位进行维护时,由于码头或泊位不能用于船舶停靠,也将为码头公司带来巨大的经济损失。
安全保障方面,传统的缆绳系泊方式下,运送系缆绳以及稳固系缆绳的工作人员处于船只与码头/岸基设备之间,这存在很大的安全隐患。此外,对于系泊的小型船只,当周围系泊的大型船只突然启动主机时,这些小船可能会发生碰撞/挤压事故,与此同时,系缆小船的缆绳可能会突然绷断,强大的反作用力可能会对在场的工作人员造成严重的伤害;花费分配方面,船舶自主靠/系泊时产生的费用主要分配在岸端系缆工作人员聘用,运送系缆绳小型船舶租赁,主机常开状态下燃料消耗等方面。
随着科学技术的发展,新型的船舶驱动方式的出现有效地提高了船舶的操纵性及稳定性,自动化、无人驾驶、无人化控制技术的发展促成了无人船、智能船、无缆系泊装置、智能码头的出现,有效保证了船舶靠系泊过程的安全性及经济型,物联网技术有效保证了信息传递的及时性及准确性。但这些技术当前均以单一个体为对象,而船舶的靠系泊过程一个复杂的多对象参与的过程,是靠系船舶、航经船舶、码头之间不断交互的过程,建立一个智能船自主靠系泊船岸协同一体化系统既是技术发展的趋势,也是以绿色、安全、快速、经济为目标的新一代水路交通系统的必要发展需求。
模块化系统具有技术架构清晰、维护成本低、功能界限明确等优点,对于作业流程复杂、参与对象多、控制精度高、安全要求严格的船舶靠离泊作业,构建模块化的船舶自动靠泊系统,是值得发展与推广的。
总地来说,船舶自动靠泊系统可以分为三个模块:船端感知及控制模块,岸基设备感知及控制模块,以及数据交互模块。其中,船端感知及控制模块主要负责环境、本船及他船航行状态感知,船舶靠泊作业决策与航迹、航向、航速规划,船舶低频运动控制等功能;岸基设备感知及控制模块则主要针对岸基无缆系泊设备实现对设备自身、系泊船舶状态以及设备压力等的感知、设备运动及吸附力控制等功能;数据交互模块主要以数据库的形式,在两个控制模块之间进行数据存储及交换,从而实现信息的同步,提高感知精度及控制精度,降低船舶运动及设备控制风险,系统示意图如图所示:
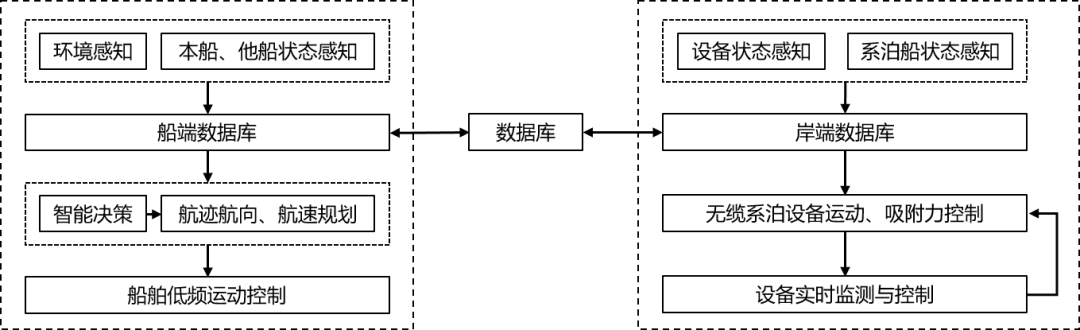 图8 船舶自动靠泊系统
靠离泊运动是船舶运输营运最后一公里的关键问题,建立模块化、系统化的船舶自动靠泊系统,能够减少船舶靠离泊过程中人员劳动强度、提高作业效率和安全性,具有迫切的现实需求和重要的理论意义,其关键技术主要包含船舶低速运动建模技术、船舶低频运动控制技术、船-岸协同感知技术、智能无缆系泊技术等。
船舶的靠离泊运动,例如紧急制动、横向移动、短时间进车、掉头等为典型的低速域运动]。低速域下,船舶前进速度接近于零,船舶横向速度和转艏角速度与前进速度处于同一量级,且涵盖0—180°的漂角范围,船舶水动力非线性强;富余水深小,浅水及岸壁效应明显,风、流等外部干扰不可忽略;船速低、桨转速小、没有舵效,需要借助侧推器、拖轮、锚缆等操纵设备控制船舶的横移与转向。当前对船舶运动模型的研究主要围绕常速域下船舶的操纵运动,对于低速域下船舶的操纵性研究较少;此外,船舶操纵性的研究主要采用经验公式法、试验法以及计算流体力学方法,基于回归分析的经验公式法依赖数据广度,试验法研究周期长、推广性差,目前常采用计算流体力学方法对船舶水动力、流场发展进行研究。构建船舶靠离泊作业条件下的操纵运动模型,是船舶运动控制的理论支撑,是实现船舶自动靠离泊作业的理论基础。
船舶的靠离泊运动控制不是一个独立的控制任务,而是同时包含了作业决策、目标规划以及低频运动控制。根据靠泊船舶自身船型、载重、推进性能,以及泊位水流、气象等情况,船舶的安全靠离泊作业往往采用顶流入泊(直接入泊、掉头入泊)和平行入泊的方式完成靠泊;目标规划则是以入泊方式为基础的,根据作业需要,目标规划往往包含轨迹规划、航向规划、航速规划等。船舶的靠离泊作业对船舶位置、艏向角、速度控制精度要求高,传统控制方法难以保证船舶在期望位置和姿态同时镇定,此外,传统船舶由于硬件限制,无法实现推进系统及转舵系统的高频无级控制。为此,国内外学者结合船舶路径规划算法,不依赖准确的船舶运动模型设计船舶的自动靠泊控制系统,例如模型预测控制、人工神经网络、模糊逻辑控制、数据驱动控制、滑模控制、A*路径追踪、自抗扰控制等自适应控制算法,这些方法往往依赖算法本身的鲁棒性,而忽略了船舶运动模型的准确性,缺乏船舶水动力机理支撑。开展基于船舶运动模型的船舶低速运动控制研究,是实现船舶自动靠离泊的技术基础。
船舶的靠泊控制主要步骤为:(1)改变航向,(2)逐级降速,(3)主机停转,依靠余速入泊。根据自动靠泊控制思路及控制手段,自动靠泊流程可以描述为:①船舶由港区移动至泊位附近的A点,②船舶以低速由临近泊位处的A点移动至泊位处的目标点B点,并同时考虑避让静态和动态障碍物。对于船舶自动靠泊系统,靠泊船舶与岸端设备之间的协同感知与交互更是安全系泊的基础。可见,协同感知技术是船舶靠离泊控制的主要辅助手段,船舶的自动靠泊控制是以协同感知技术为保障的。当前船-岸靠系泊感知设备及算法存在传感器视角受限、先验信息缺失、多源信息冗余、数据匹配与信息同步复杂等问题。针对船舶靠泊、系泊场景,基于船-岸视觉、激光雷达、超声波雷达等传感器和多网融合技术,进行多源信息融合与补偿以及信息交互,重构符合人-机工程的船舶靠系泊作业环境信息与船舶运动及姿态信息,是当前实现船-岸协同感知的主要手段与发展方向。突破面向船舶靠系泊的船岸协同感知技术,是实现船舶自动靠离泊的安全保障。
传统的船舶系泊方式依靠带缆工人或带缆艇将钢丝等高强度缆绳与系缆桩联结,进而将船舶固定于泊位。这种方法作业强度大、风险高、效率低,作业难度大,存在脱缆、断缆等安全隐患。随着船舶大型化、专业化的发展,传统系泊方法面临的挑战日益增大,无缆系泊方法得到有效发展。当前,无缆系泊主要分为磁吸式系泊及真空式系泊,其中,磁吸式系泊装置结构简单、空间占用率低、工作效率高等优点,但由于有害磁场对船载设备的影响,目前其发展受到一定限制。真空式系泊方式利用真空和液压技术实现无缆系泊,该方法绿色、高效、适应性强、耐用度高,目前应用程度较高。研发基于船舶感知、压力感知及动态监测的智能无缆系泊技术,是安全实现船舶自动靠泊的最后一环。
图8 船舶自动靠泊系统
靠离泊运动是船舶运输营运最后一公里的关键问题,建立模块化、系统化的船舶自动靠泊系统,能够减少船舶靠离泊过程中人员劳动强度、提高作业效率和安全性,具有迫切的现实需求和重要的理论意义,其关键技术主要包含船舶低速运动建模技术、船舶低频运动控制技术、船-岸协同感知技术、智能无缆系泊技术等。
船舶的靠离泊运动,例如紧急制动、横向移动、短时间进车、掉头等为典型的低速域运动]。低速域下,船舶前进速度接近于零,船舶横向速度和转艏角速度与前进速度处于同一量级,且涵盖0—180°的漂角范围,船舶水动力非线性强;富余水深小,浅水及岸壁效应明显,风、流等外部干扰不可忽略;船速低、桨转速小、没有舵效,需要借助侧推器、拖轮、锚缆等操纵设备控制船舶的横移与转向。当前对船舶运动模型的研究主要围绕常速域下船舶的操纵运动,对于低速域下船舶的操纵性研究较少;此外,船舶操纵性的研究主要采用经验公式法、试验法以及计算流体力学方法,基于回归分析的经验公式法依赖数据广度,试验法研究周期长、推广性差,目前常采用计算流体力学方法对船舶水动力、流场发展进行研究。构建船舶靠离泊作业条件下的操纵运动模型,是船舶运动控制的理论支撑,是实现船舶自动靠离泊作业的理论基础。
船舶的靠离泊运动控制不是一个独立的控制任务,而是同时包含了作业决策、目标规划以及低频运动控制。根据靠泊船舶自身船型、载重、推进性能,以及泊位水流、气象等情况,船舶的安全靠离泊作业往往采用顶流入泊(直接入泊、掉头入泊)和平行入泊的方式完成靠泊;目标规划则是以入泊方式为基础的,根据作业需要,目标规划往往包含轨迹规划、航向规划、航速规划等。船舶的靠离泊作业对船舶位置、艏向角、速度控制精度要求高,传统控制方法难以保证船舶在期望位置和姿态同时镇定,此外,传统船舶由于硬件限制,无法实现推进系统及转舵系统的高频无级控制。为此,国内外学者结合船舶路径规划算法,不依赖准确的船舶运动模型设计船舶的自动靠泊控制系统,例如模型预测控制、人工神经网络、模糊逻辑控制、数据驱动控制、滑模控制、A*路径追踪、自抗扰控制等自适应控制算法,这些方法往往依赖算法本身的鲁棒性,而忽略了船舶运动模型的准确性,缺乏船舶水动力机理支撑。开展基于船舶运动模型的船舶低速运动控制研究,是实现船舶自动靠离泊的技术基础。
船舶的靠泊控制主要步骤为:(1)改变航向,(2)逐级降速,(3)主机停转,依靠余速入泊。根据自动靠泊控制思路及控制手段,自动靠泊流程可以描述为:①船舶由港区移动至泊位附近的A点,②船舶以低速由临近泊位处的A点移动至泊位处的目标点B点,并同时考虑避让静态和动态障碍物。对于船舶自动靠泊系统,靠泊船舶与岸端设备之间的协同感知与交互更是安全系泊的基础。可见,协同感知技术是船舶靠离泊控制的主要辅助手段,船舶的自动靠泊控制是以协同感知技术为保障的。当前船-岸靠系泊感知设备及算法存在传感器视角受限、先验信息缺失、多源信息冗余、数据匹配与信息同步复杂等问题。针对船舶靠泊、系泊场景,基于船-岸视觉、激光雷达、超声波雷达等传感器和多网融合技术,进行多源信息融合与补偿以及信息交互,重构符合人-机工程的船舶靠系泊作业环境信息与船舶运动及姿态信息,是当前实现船-岸协同感知的主要手段与发展方向。突破面向船舶靠系泊的船岸协同感知技术,是实现船舶自动靠离泊的安全保障。
传统的船舶系泊方式依靠带缆工人或带缆艇将钢丝等高强度缆绳与系缆桩联结,进而将船舶固定于泊位。这种方法作业强度大、风险高、效率低,作业难度大,存在脱缆、断缆等安全隐患。随着船舶大型化、专业化的发展,传统系泊方法面临的挑战日益增大,无缆系泊方法得到有效发展。当前,无缆系泊主要分为磁吸式系泊及真空式系泊,其中,磁吸式系泊装置结构简单、空间占用率低、工作效率高等优点,但由于有害磁场对船载设备的影响,目前其发展受到一定限制。真空式系泊方式利用真空和液压技术实现无缆系泊,该方法绿色、高效、适应性强、耐用度高,目前应用程度较高。研发基于船舶感知、压力感知及动态监测的智能无缆系泊技术,是安全实现船舶自动靠泊的最后一环。
在新一轮产业变革及严峻的国际局势挑战下,为响应国家建设交通强国、海洋强国、制造强国的重要战略部署,紧随当前智能船舶发展技术潮流,顺应内河港口发展需求,作为船舶整个运输营运过程始终阶段的船舶靠离泊作业,是当下智能船舶领域的研究重点与攻克方向。为避免由于港口及泊位环境差、船岸基础设施弱、船舶自动化程度低、操纵性差等客观因素,以及人员素质低、经验不足等主观因素导致的内河船舶靠泊作业风险高、效率低、环境污染严重等问题,开展面向内河船舶自动靠泊的低速运动建模技术、低频运动控制技术、船岸协同感知技术、智能无缆系泊技术等内河船舶自动靠离泊技术研究刻不容缓。加强制造业、航运业、船级社、高校与科研院所的融合,形成产、学、研、用、检等各机构的互动、互通、互联,在全链路深耕细作,突破行业壁垒,助力我国在智能航运业、智能制造业等领域夺取船舶智能设备、智能控制标准制定权,抢占智能船舶、自主化船舶市场。
作者:张松 刘佳仑 李诗杰 叶珺
文章来自:中国船检





















