水下航行器是一个复杂的多学科交叉耦合系统,设计过程涉及多个学科领域的知识和技术难点,如水下环境、水动力学、导航和定位、通信和数据传输、能源管理、自主性和智能化,以及可靠性和安全性等。解决这些难点需要跨学科的合作和创新思维,结合机械工程、电子工程、控制工程、材料科学、海洋科学和计算机科学等多个领域的知识和技术。
基于模型的系统工程(MBSE)作为一种先进系统设计方法论,可利用计算机模型和仿真技术来指导和优化系统设计过程。在水下航行器的设计过程中,MBSE可以发挥重要的作用,帮助设计师理解系统的行为、性能和相互关系,并优化设计方案。
以下是基于模型的系统工程在水下航行器设计中的一般步骤:
定义需求:明确水下航行器的功能和性能需求。这些需求可能包括航行速度、潜水深度、载荷能力、能源消耗等。
建立系统模型:利用计算机软件或仿真工具建立水下航行器的系统模型。模型可以包括船体结构、推进系统、导航和控制系统等各个组成部分。
验证和测试:基于模型设计的水下航行器原型进行验证测试,验证系统模型的准确性和可靠性。根据测试结果对模型进行校准和调整。
优化和迭代:根据验证测试的结果,对系统模型进行优化和迭代,进一步改进水下航行器的设计。这可能涉及到组件替换、参数调整或系统配置的更改等。
强化学习和自适应控制:基于模型的系统工程(MBSE)可以结合强化学习和自适应控制算法来改善水下航行器的控制性能。通过模型预测和反馈控制,可以实现对航行器的自适应调整和优化,以适应不同的水下环境和任务需求。
故障模拟和容错设计:系统模型可以用于故障模拟和容错设计,通过模拟不同故障场景,评估水下航行器在故障情况下的性能和安全性。基于模型的容错设计可以提高水下航行器的可靠性和稳定性,并在故障发生时采取适当的措施保证任务的完成。
跨学科优化:水下航行器的设计需要涉及多个学科领域,如流体力学、材料科学、控制工程等。基于模型的系统工程可以促进不同学科之间的合作和交流,通过模型集成和多学科优化,实现水下航行器设计的综合优化。
集成测试和验证:系统模型可以用于水下航行器的集成测试和验证。通过模型模拟航行器与其他设备、传感器和通信系统的集成,评估整个系统的性能和兼容性。这有助于发现和解决潜在的集成问题,提高系统的可靠性和一体化程度。
综上所述,MBSE在水下航行器设计过程中具有重要的作用。它可以提供全面的设计优化和评估手段,促进不同学科领域的合作,提高水下航行器的性能、可靠性和安全性。这种方法有助于推动水下航行器技术的发展,并应用于海洋勘探、海洋科学研究、水下救援等领域。
MBSE在水下航行器设计过程中进行广泛应用可能会面临一些挑战和困难。
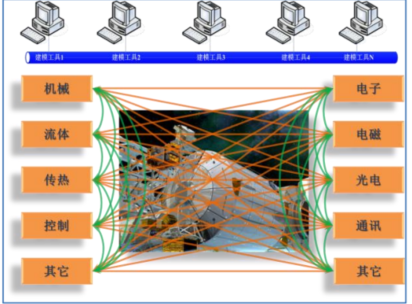
1)多学科耦合:水下航行器是一个多学科交叉耦合的系统,涉及船体结构、动力系统、控制系统、电子设备等多个方面。设计团队可能使用多种建模软件来支持不同方面的设计和仿真。如控制系统用的比较多的是Matlab/Simulink、MWorks、动力学系统可能用Adams或者Simpack、液压领域则是AMESim最为优秀、发动机模型可能会用到Wave-RT 或者GTPower、空调系统会采用Dymola、此外还有很多与复杂系统建模相关的工具例如MapleSim和SimulationX、甚至是C/C++、Fortran 模型等,在进行仿真测试时,需要综合考虑各个方面的相互影响和交互作用。建立准确的多学科耦合模型并进行仿真是具有挑战性的。
2)复杂性和精确性:水下航行器系统具有复杂的结构和功能,需要考虑多种因素和物理现象。为了获得准确的仿真结果,需要建立准确的数学模型,并使用精确的物理参数和假设。这需要大量的计算资源和时间。
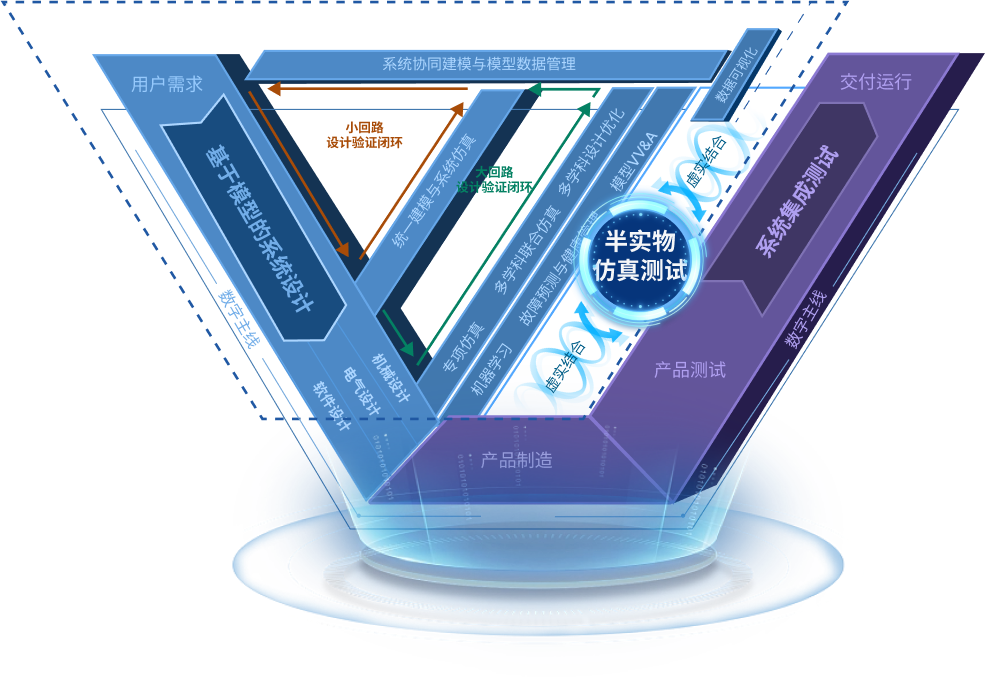
3)仿真测试一体化:现代V字形产品开发流程强调从需求、到设计、仿真、测试、集成、联调的连贯性。这个过程是一个按照VV&A的原则反复迭代的过程,并且非常注重应用基于模型的设计理念。然而,当前大部分企业的产品开发仍处于设计仿真和集成测试脱节的状态。研发工程师有能力建立模型,但是不具备测试的手段,仿真仅仅局限于数学层面;测试工程师拥有测试设备,但是所开展的基本上都是全物理测试,不具备在产品生产出来之前开展硬件在环测试的仿真模型。这非常不利于现在V 模式产品开发流程所要求的设计、测试一点的原则。
4)实时性和复杂度:水下航行器系统的仿真涉及大量的计算和复杂的数值算法。如何保证这些精确但复杂的各类模型在规定的毫秒甚至微秒级的步长内实时解算完毕,并与外部硬件进行高效的通讯,对实时仿真测试平台的性能提出了一个严峻的挑战。
此外,参与复杂系统实时仿真的各个模型,因为所描述的物理对象不同,往往需要以不同的仿真步长运行,但都必须要求拥有一个精确一致的时间,使不同的模型在相同的时间节点上进行相互作用。因此,实时仿真测试各成员的时钟同步和方式、模型间的数据通讯和方式,也是必须要解决的关键问题。
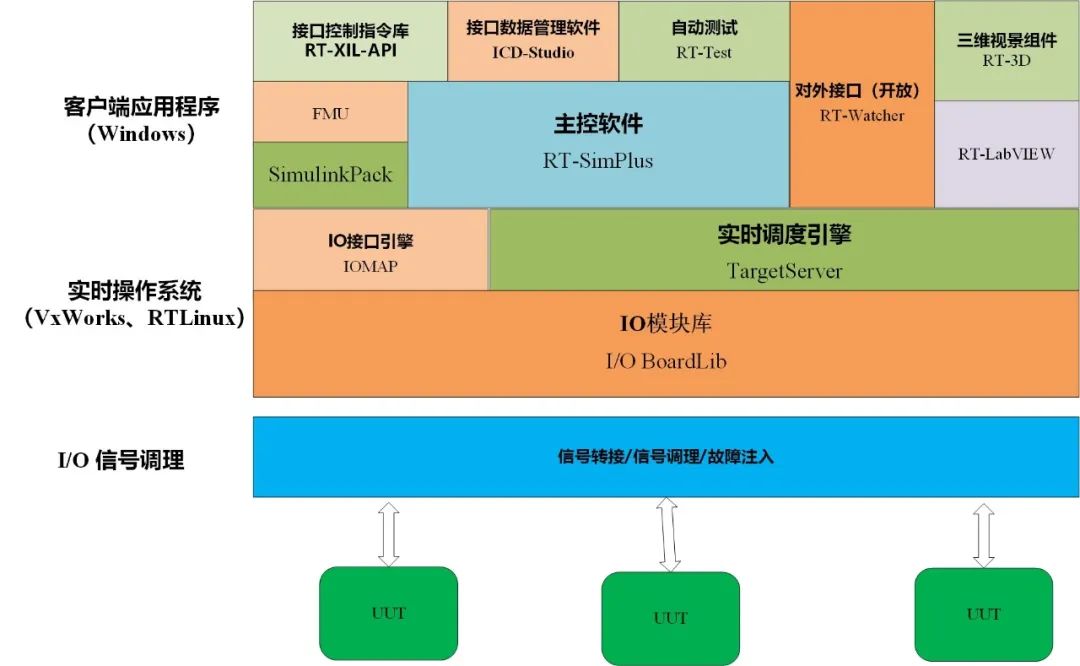
基于MBSE的Links-XIL智能装备仿真测试一体化数字孪生平台,是灵思创奇在实时领域积累工作经验的结晶,是在众多应用案例的基础上,为了应对上述挑战而推出的。该解决方案可以导入各类模型,并使其在硬件时钟的精确调度下各自按照指定的速率在高性能多 CPU 架构下实时求解、交换数据、并与外部硬件进行高效的通讯,具备
强实时、多用户、多任务、多学科、多模型、多速率、多I/O、多处理器
的等特点。
该解决方案可以通过其开放的接口与各类测试系统进行集成,其功能覆盖V 模式现代开发流程中数学仿真、快速原型、硬件在环、系统集成、联调测试与故障注入的各个阶段的任务,以及不同阶段的快速迭代转换,是产品从以往面向功能实现、到当前着重系统性能飞跃的高品质设计、开发和验证的理想平台。
注:点击图片可了解产品详情
基于Links-XIL智能装备仿真测试一体化数字孪生平台在某型号水下航行器研制项目中成功搭建了半实物仿真验证实验室,提供水下航行器半物理仿真模块库,该模块库根据模块化、通用化思想,合理划分功能模块,完成动力学、环境、传感器和执行机构模拟器等模块;将典型水下航行器分布式半物理仿真实验流程形成较为完善的试验指导书,能够达到新入所人员独立学习掌握,帮助客户建立一支良好的半物理仿真测试队伍。
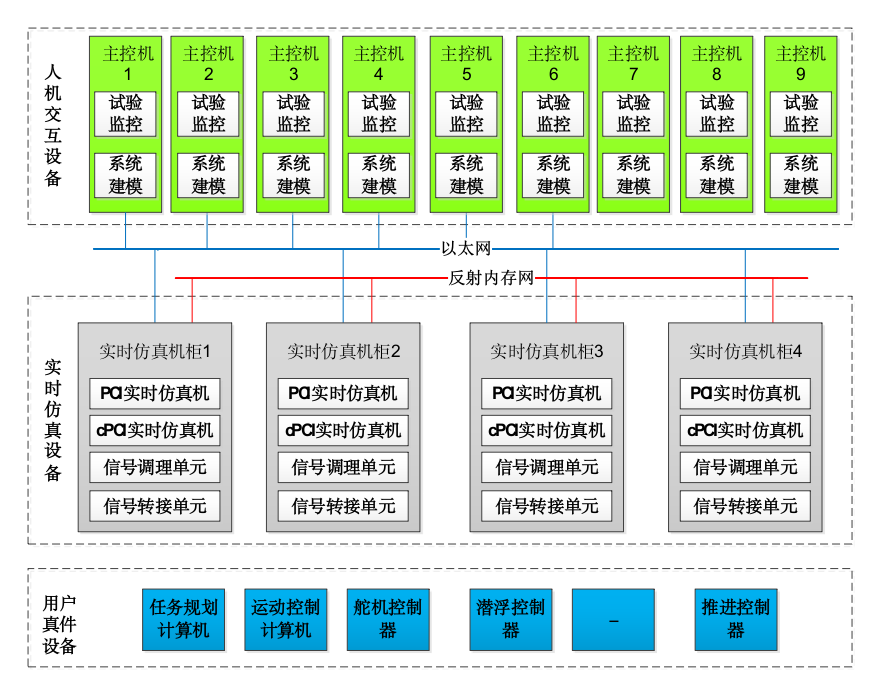
本平台包括9个主控机节点、两套实时仿真机柜,并通过以太网和反射内存网实现与已有系统的互联互通,协同工作。
以均衡系统为例,本项目采用SimScape进行建模。SimScape产品提供了一个自然、高效方法来构造物理系统的数学模型。通过物理连接来创建多域原理图,具体特性如下:
1)与Simulink®控制算法在同一环境下仿真多域物理系统
2)物理建模模块,涵盖 10 个以上物理域,包括机械、电气、液压和两相流
3)基于MATLAB®的Simscape™语言,支持使用文本定义物理建模组件、域和库
4)符号方程降阶以及适用于微分代数方程(DAE)组的求解技术,包括事件处理
5)用于实时仿真和硬件在环(HIL)测试的专业求解方法
6)参数和变量都有物理单位,并自动进行单位转换
7)(利用 Simulink Coder™)支持生成C代码
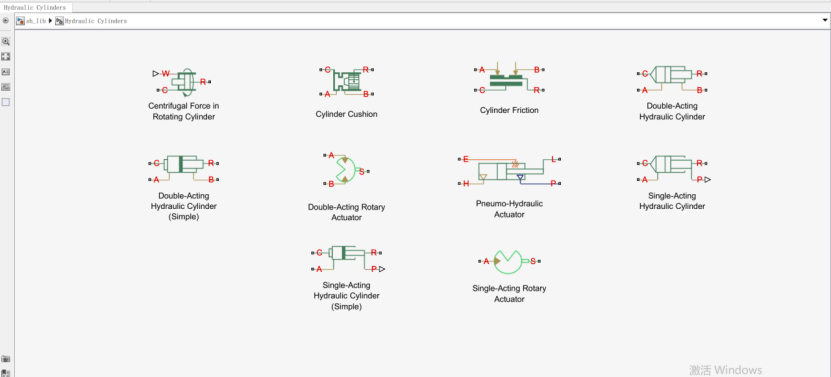
图1SimScape液压模型库
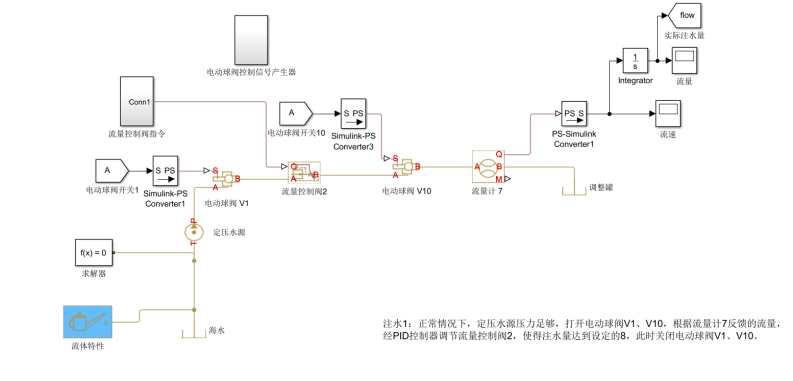
图2注水模型
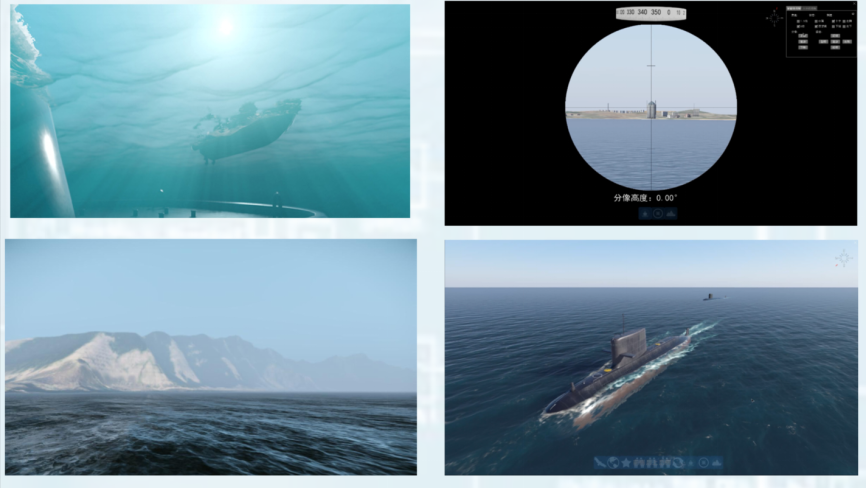
图3水下航行器运动姿态三维展示
本实验室可以提供准确、可重复的测试环境,帮助设计团队验证系统性能、优化控制策略、评估人机交互性、验证系统安全性、提前发现问题,同时还可以优化交互与反馈、评估效能、进行系统集成与验证,以及增强培训和操作准备。这些方面的优化和改进可以提高水下航行器控制系统的可靠性、效能和安全性。
 2023年6月7日 14:29
2023年6月7日 14:29
























