使用Fidelity Pointwise对 5 种不同几何形状进行高阶网格划分
传统上,向网格添加单元(称为 H 细化)是提高解精度的主要方法。额外的分辨率能够捕获通常由同一网格的较粗变化扩散的流动现象。用于提高空间和时间精度的另一种技术是通过执行度数提升,既针对给定单元内的假设解又针对单元本身,称为高阶 (HO) 网格划分。这样做时,线性网格可以通过沿边、面和内部添加节点而变得弯曲。这样就需要更少的元素来准确地表示弯曲几何形状并捕获感兴趣的复杂流动特征。
** 在表征 HO 网格时,请务必注意,其阶数等于其多项式次数加一。因此,线性网格的阶数为 1,阶数为 2,二次网格的阶数为 2,阶数为 3,等等。
1. 球体
球体由聚集在球体表面的各向异性单元层进行网格划分,过渡到各向同性远场四面体网格。生成三种单元类型(仅四面体、棱柱和四面体以及混合单元)和四种多项式次数(线性、二次、三次和四次)的网格。
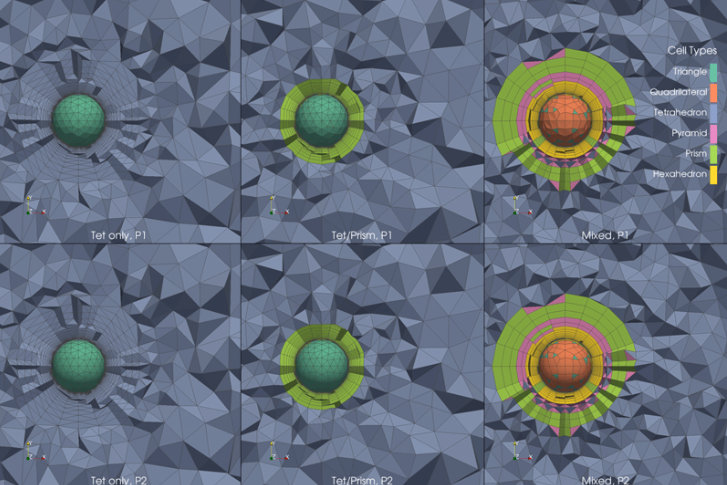
图 1. P1 网格位于顶行,P2 网格位于底行。
2. 仅机翼几何形状
HO 网格是在第三届AIAA 阻力预测研讨会 (DPW)的仅机翼几何体上生成的。为了保持自由度数相对恒定,原始线性网格中的单元数随着多项式次数依次增加而减少。体积网格由表面附近的各向异性单元层组成,这些单元在远场中过渡为各向同性四面体。
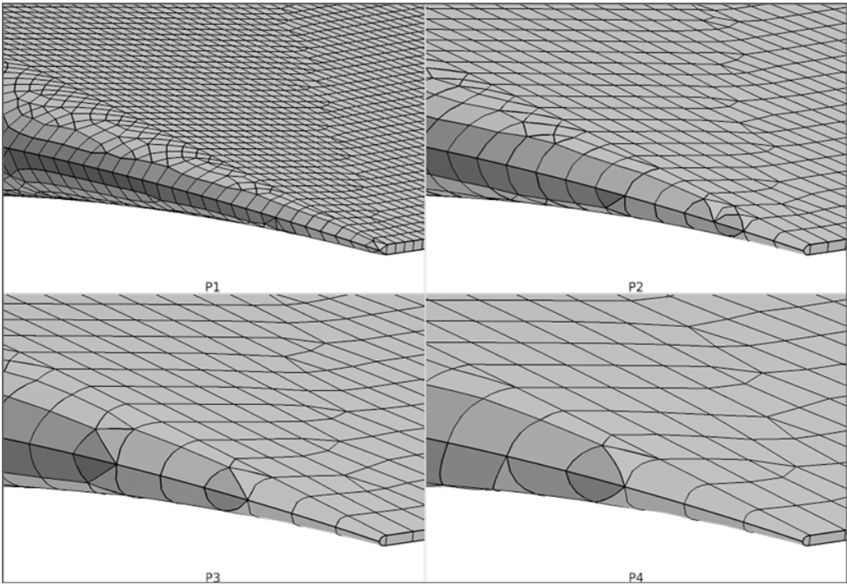
图 2. DPW 3 机翼表面网格、尖端区域和前缘的特写视图。从左上角顺时针方向:P1、P2、P4、P3。
3.罗宾机身
通用 ROBIN 机身使用 Pointwise 进行网格划分,然后提升到 P2 网格。创建了两个线性网格和两个 P2 网格,目标是每个粗略和精细版本的 P1 和 P2 网格中的节点数量大致相同。
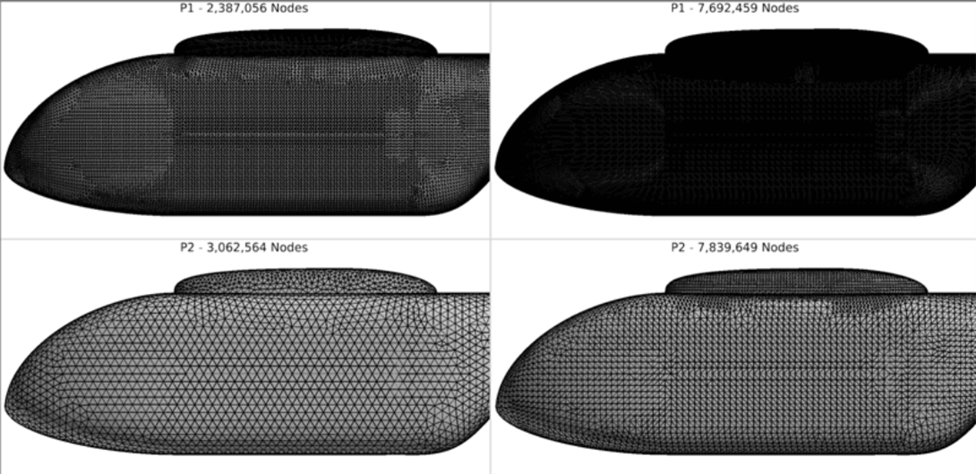
图 3.ROBIN 机身的 P1(顶行)和 P2(底行)精细和粗略表面网格。
4. 机头起落架配置
来自第三届AIAA 机身噪声计算基准问题研讨会的飞机前起落架配置 用于高阶网格生成。使用 Fidelity Pointwise 软件将配置的粗线性网格提升至 P2。
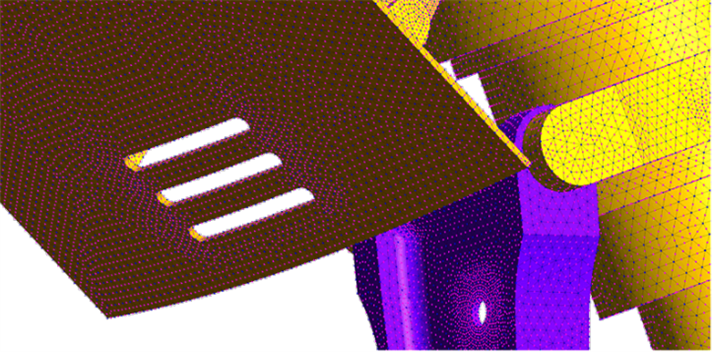
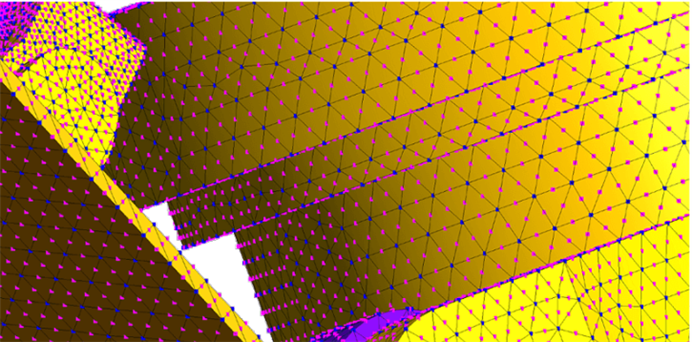
图 4. BANC III 起落架与插入的 P2 节点啮合(左),BANC III P2 网格的特写视图(右)。
5. NASA CRM 翼身
本研究使用第六届 AIAA CFD 阻力预测研讨会的 NASA 机翼-机身配置通用研究模型。粗分辨率、线性、非结构化四面体网格用作 P2 和 P3 高阶网格的基础。生成由混合元素组成的新表面网格,并作为 P4 网格的基础。
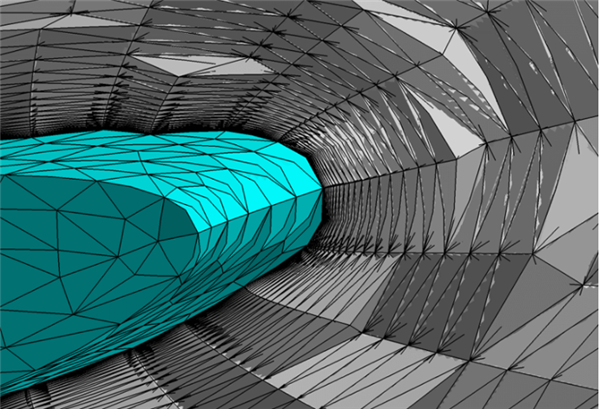
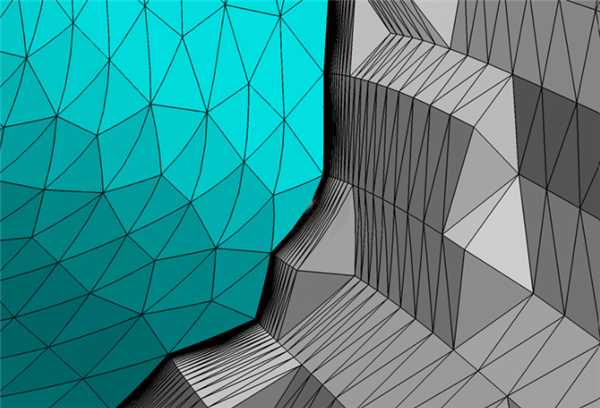
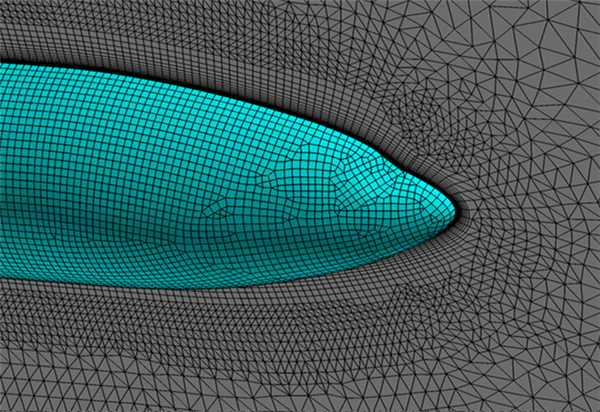
图 5. 靠近翼尖后缘的 DPW6 CRM 翼身配置的 P2 网格的轴向切割(左),尾部凹口附近的 DPW 6 翼身配置的 P3 网格的轴向切割(中),混合用于 DPW6 翼身配置的 element P4 网格(右)。
参考
Steve L. Karman、J. Taylor Erwin、Ryan S. Glasby 和 Douglas L. Stefanski,“使用 WCN 优化的高阶网格弯曲”,AIAA 论文第 1 号。2016-3178,2016 年 6 月。
文章来源:cadence博客




















