FLUENT水下推进器螺旋桨计算
 2023年7月7日 16:10
2023年7月7日 16:10浏览:4555 评论:2 收藏:14
正文共: 1590字 13图 预计阅读时间: 4分钟
水下推进器是潜艇、船只等装备的重要设备,负责为装备的运动提供所需的动力。其基本工作原理是借助轴的扭矩使叶片随轴产生旋转运动,流经推进器的水动量发生变化,根据牛顿第三定律,将会对推进器产生一个推力。今天,我们用一个假想的推进器螺旋桨做一个计算案例。
建立如下的三维计算模型,对于该问题的计算,类似于离心泵的计算,需要建立动、静子域。本案例中,螺旋桨及其外围附近的圆柱面构成旋转域,圆柱面和外围方形(也可以是圆柱形)构成静态域,圆柱面为动静域的交界面(interface)。划分多面体网格,重点对螺旋桨附近的网格进行细化,因为此处的变量梯度最大。另外,视螺旋桨的结构复杂程度,旋转域的网格质量通常难以达到较高水平,本案例的最小正交质量为0.1。
采用默认的SST k-ω湍流模型,控制壁面的Y+接近1。
我们设定进口流速0.3m/s,类比风洞试验,该速度也是表征推进器和母装备(潜艇、船只)以0.3m/s的速度前进。本案例的进口速度方向为-Z,则推进器移动方向为+Z。
本案例采用MRF多运动参考坐标系方法模拟动域,该方法为稳态计算,求解时间相对较短。当然也可以用滑移网格(mesh motion),只能瞬态计算,但是,可以模拟实际运动状态。按下图设定旋转域的角速度,FLUENT角速度的方向采用右手定则。本案例设置的旋转轴为+z,角速度为负值,实际上旋转轴为-Z,根据右手定则,表示的旋转方向如图所示。
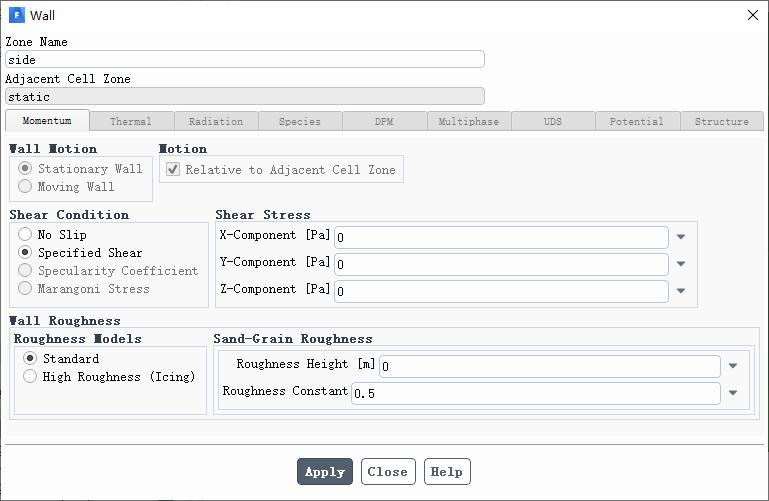
螺旋桨的壁面设定为运动壁面,运动参数设置如下,表示螺旋桨和动域一起旋转。
其它求解设置默认,建议对于该问题,压力速度耦合采用coupled算法,收敛性更好。
我们先看一下残差曲线,和推力监测曲线,可以看到收敛效果还不错,如果收敛性很差,首先考查一下是不是网格质量问题。
螺旋桨壁面的静压力以及附近的速度矢量如下,可以看到介质旋转并向-Z方向运动,根据前面设定的转动方向,叶片在迎面上的压力大于背面的压力,这样根据叶片的形状,会产生+Z方向的推力,这也符合动量守恒定律。
我们读取一下螺旋桨的推力值,总推力为7007N,压力的贡献是正值(如前文分析),粘力的贡献为负,介质向后流动必然产生向后的粘性力。
我们再读取一下螺旋桨的扭矩值,总扭矩为2593N·m。FLUENT扭矩的方向也采用右手定则,可以看出扭矩的方向和旋转方向是相反的,符合实际情况。
综上分析,螺旋桨在该旋转方向和旋转速度下,将产生+Z方向上7007N的推力,使得装备以0.3m/s的速度向+Z方向移动。将前进速度乘以推力得到前进的功率为2102.1W,将总扭矩乘以旋转角速度得到推进器的输入功率为27148.7W,这个工作点下推进器的效率为7.7%。
若我们将动域的旋转方向改变一下,同时进出口的边界不变,则必然产生方向的推力(如下),也就是前文所说的运动状态是不成立的,假设+Z是运动目标方向,则该旋转方向将使得装备反向运动。
其中Va为来流速度(m/s),本案例为0.3m/s;D为螺旋桨叶片外径(m),本案例为1.2m,n为转速(转/秒),本案例为(200/60)转/秒T为推力(N),Q为扭矩(Nm),ρ为介质密度(kg/m3),水的密度998.2 kg/m3。
于是本案例计算点螺旋桨的性能参数如下,也就是当装备的流动阻力等于螺旋桨的推力时,螺旋桨的工作点参数如下:
可以通过计算不同的来流速度(亦即装备航行速度),获得螺旋桨的性能曲线(横坐标为J),纵坐标为KT,KQ和η0如下,当J=0.7,亦即装备航行速度2.8m/s时,本案例的螺旋桨效率最高,此时推力(装备航行阻力)734.3N,螺旋桨扭矩339N·m,输入功率3.549kW,装备航行的功率2.056kW。注意,本案例的螺旋桨为随意画的,性能参数没有实际应用意义。
[1] CFD ANALYSIS OF CONTROLLABLE PITCH PROPELLER USED IN MARINE VEHICLE
[2] Marine Propellers
文章来源:南流坊

技术邻APP
工程师必备
























