本案例图文指导干涉配合与橡胶压缩,并对典型错误给出分析解决办法。
问题描述
材料信息
除橡胶套以外均以解析刚体模拟,橡胶以超弹性模拟。

工作目录
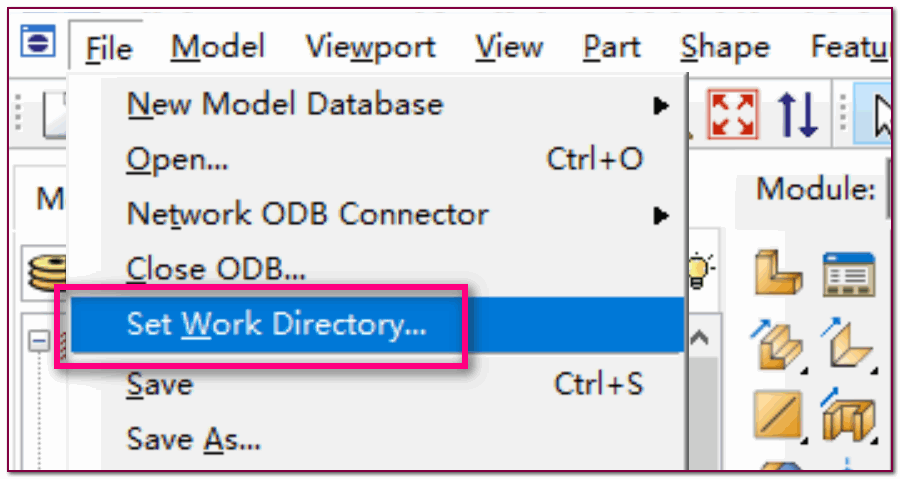
选择
File > Set Work Directory
设定工作目录
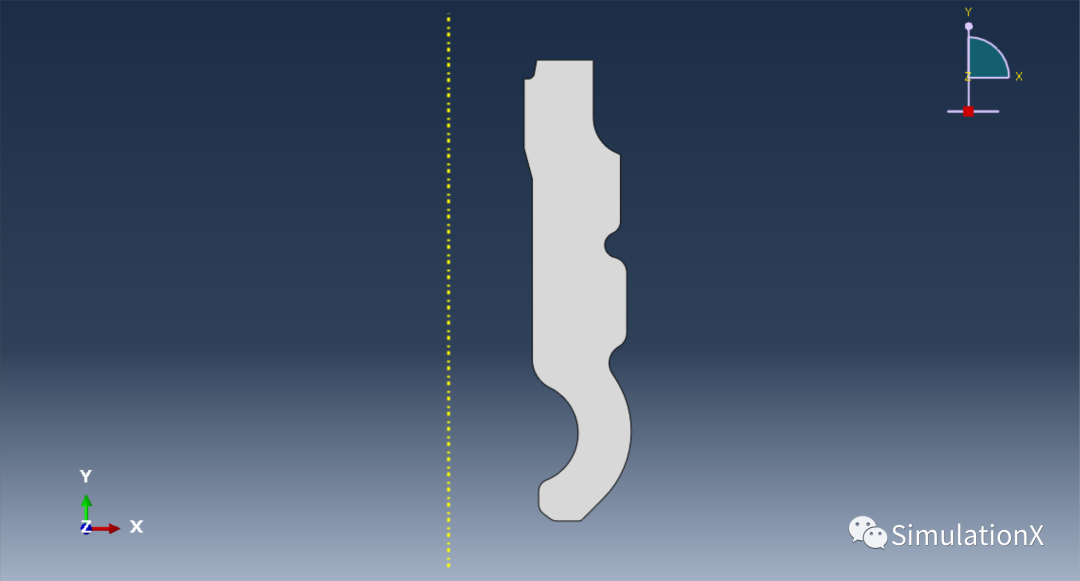
几何模组
单击Open,从工作目录选择Bumper.cae并打开
属性模组
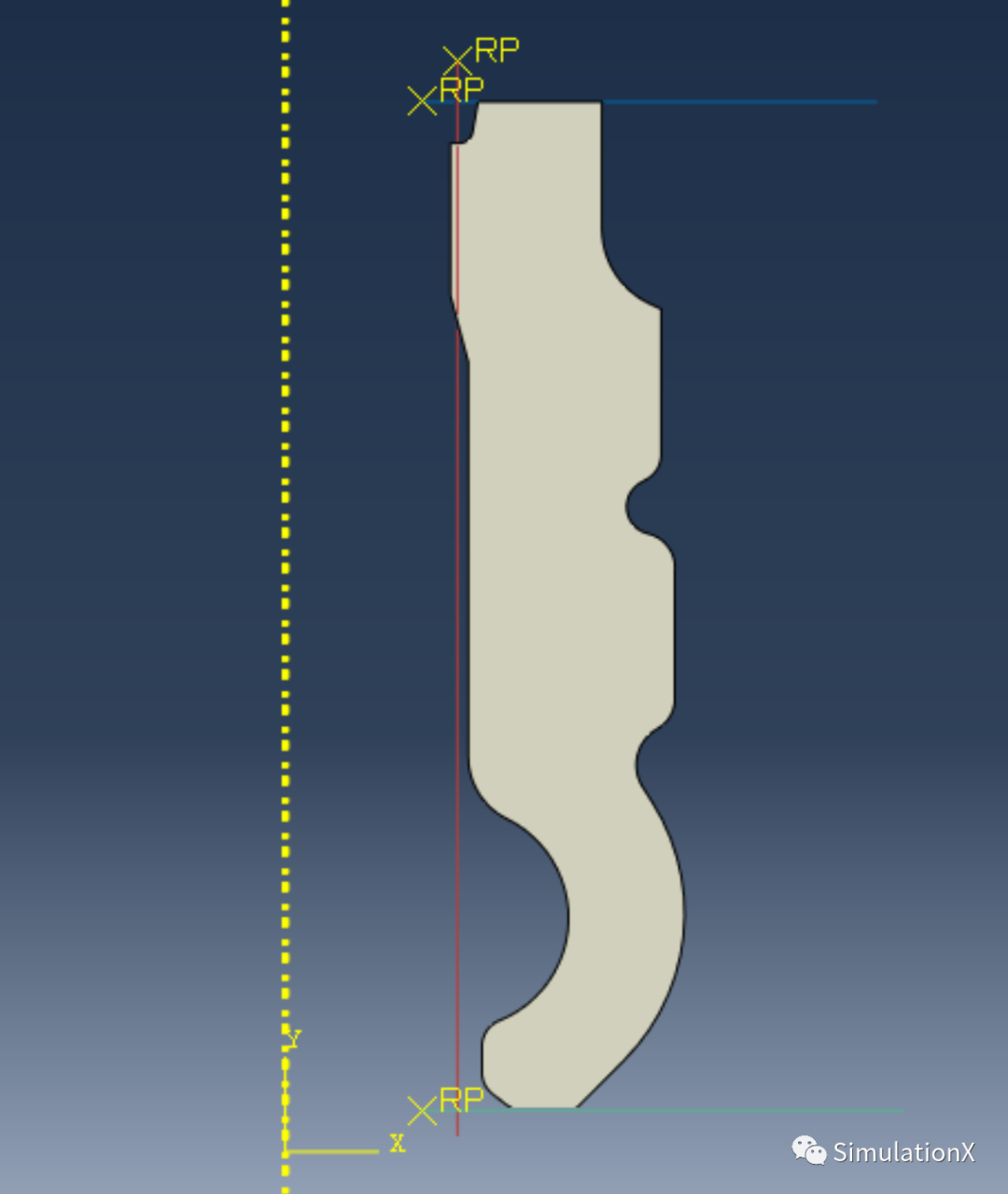
装配模组
装配体的建模技巧就是用软件的Sketch或者CAD将草图之间的关系提前布局好,然后倒入草图,使用草图建模。
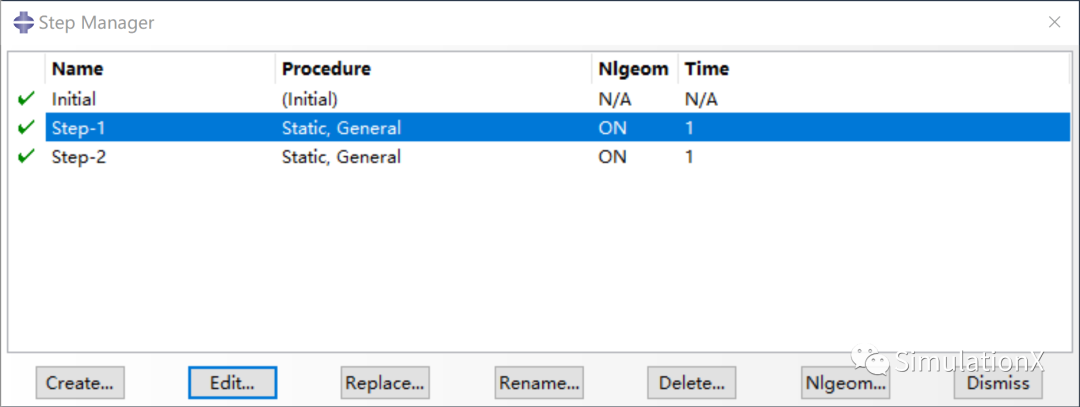
分析步模组
分析程序会选择使用
Static, General
。共包含2个分析步,第一个分析步用于解决干涉配合问题,第二个用于橡胶压缩(两个分析步有明显不同的内容,这也是划分分析步的关键)
求解干涉配合和橡胶压缩都需要设定合适的初始增量以及最大增量,默认不足以解决问题。官方推荐,一般的非线性初始增量大小可设置为0.1。稍微复杂一点的,可考虑设置0.05,难度很大的一般设置为0.01。都只是推荐值,可以自己尝试调整。
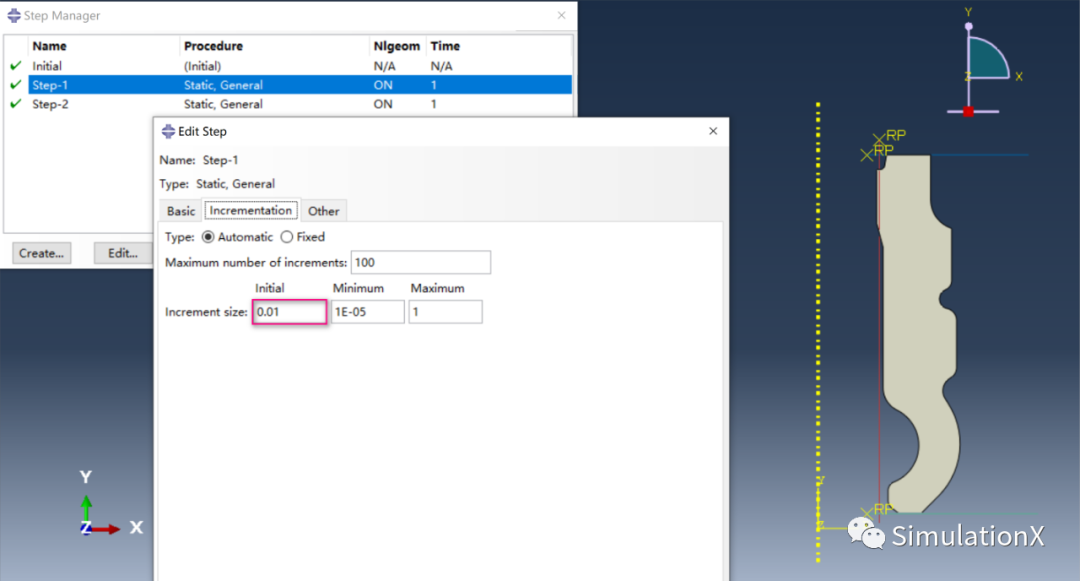
求解干涉配合,这里推荐初始为0.01。
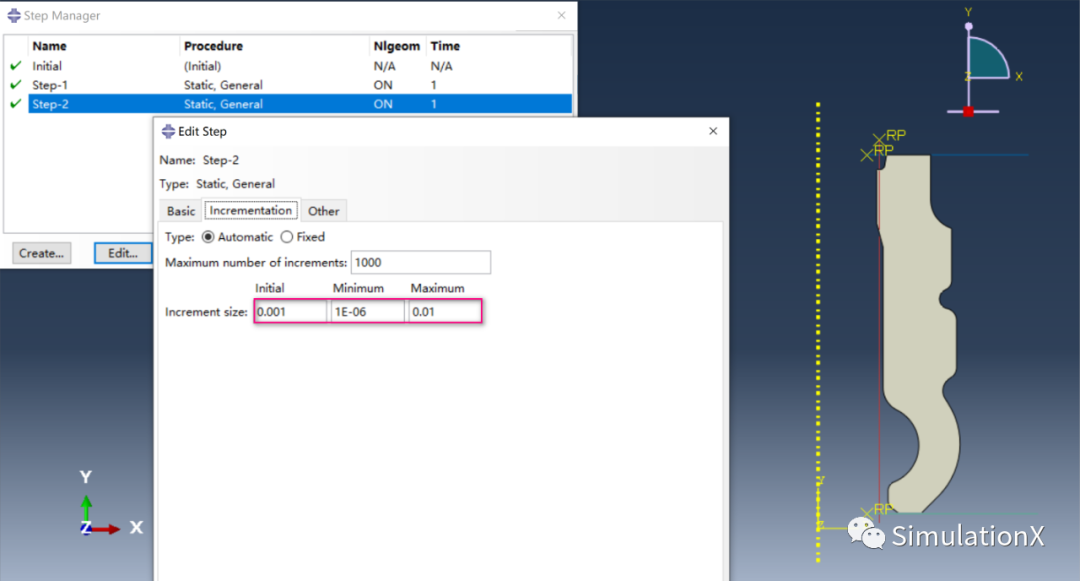
橡胶压缩载荷步,增量设置推荐如上。
进入历程输出请求管理器【History Output Requests Manager】编辑默认的输出请求(告诉软件你想要什么结果),除了默认的请求外,新增
如下历程输出:
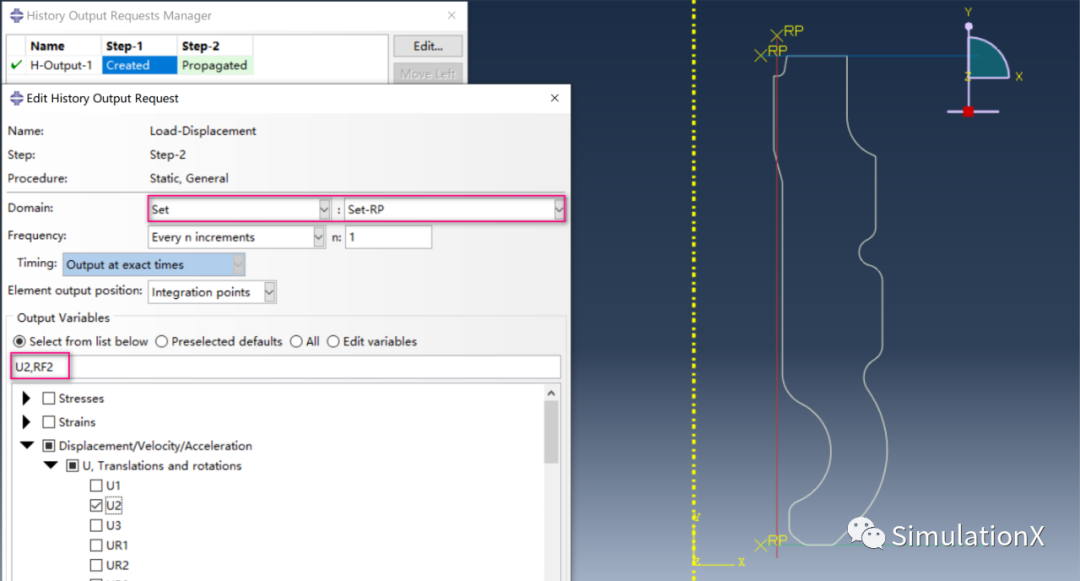
上面的set为顶部压缩部件的刚体参考点,想要输出它的位移与荷载的关系
在
Load
模组下,点击
Create Boundary Condition
。初始条件下所有部件都是固定固定状态,刚体请对参考点施加位移约束
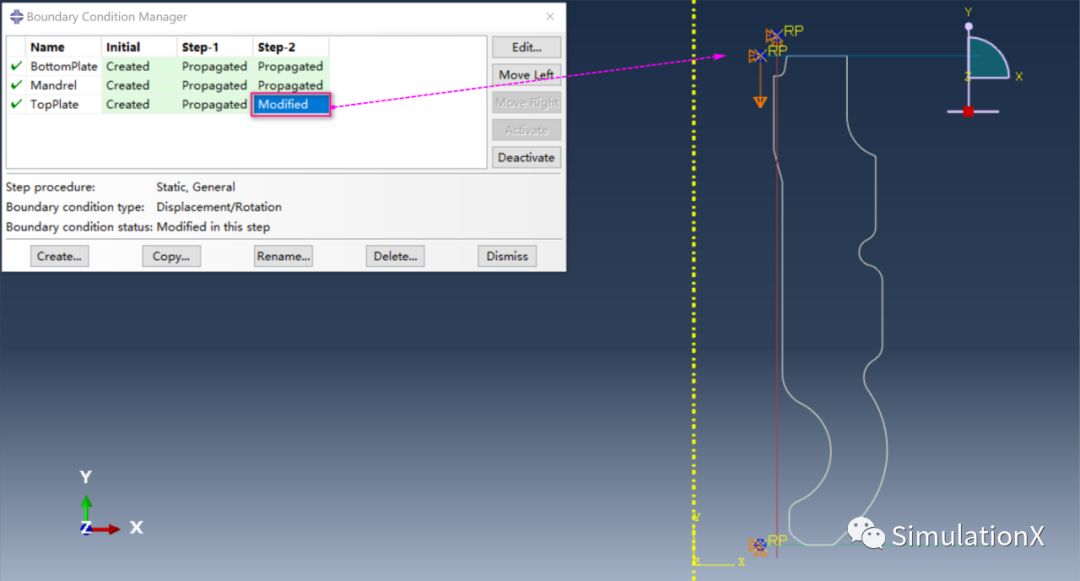
切换至
Load
模组,我们这里以位移的方式加载
。直接修改橡胶压缩分析步中位移边界条件即可:
交互模组
橡胶与周围部件均是有限滑移面面接触,摩擦系数取0.1。包括橡胶与上下底板以及与内孔轴之间接触关系,示例如下:
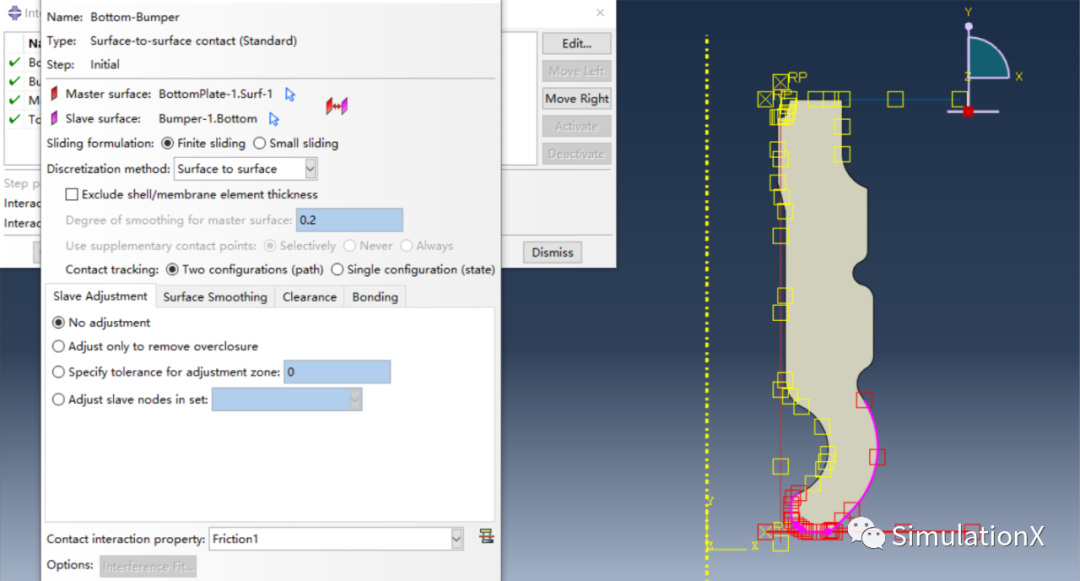
其中橡胶轴套内孔与轴之间的干涉已经在初始建模设定好,软件会自动识别,至于是否会以干涉状态求解取决于你选择的是哪一种接触建模方法(接触对与通用接触)以及初始干涉的大小。
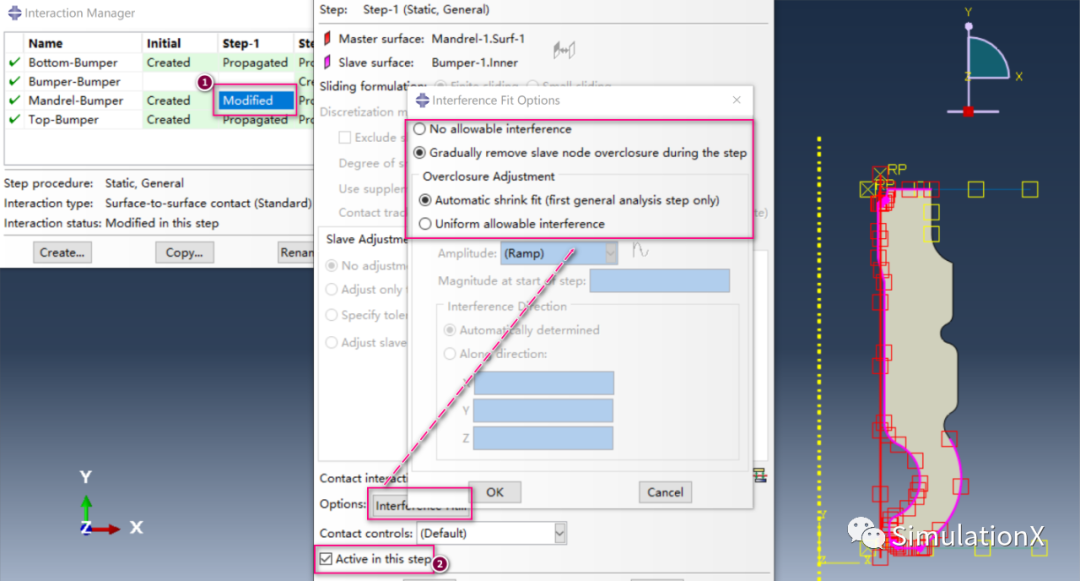
上图是关于干涉配合的设定,我们告诉软件请在第一个分析步激活干涉配合求解。
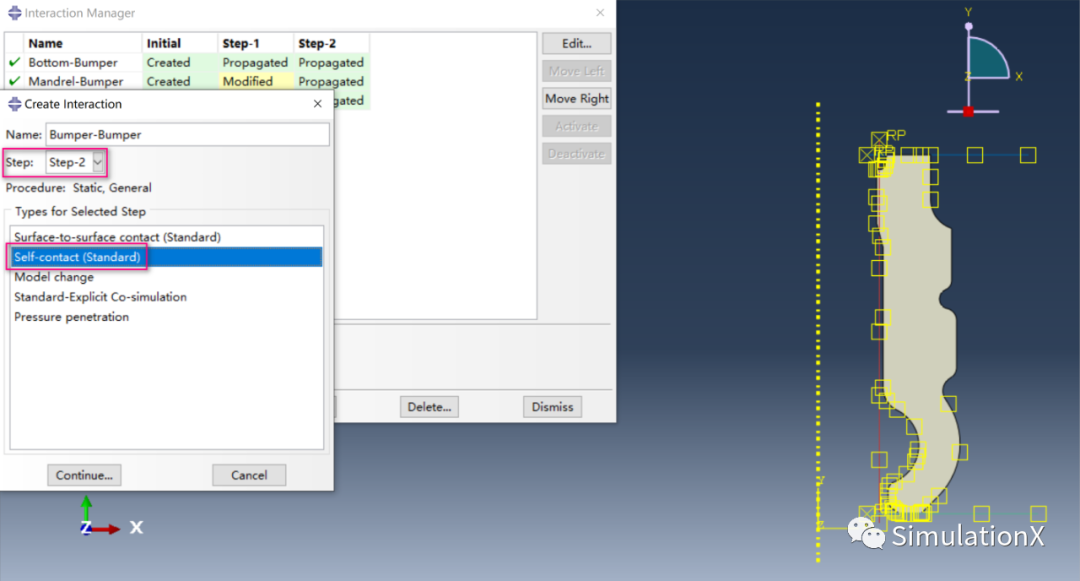
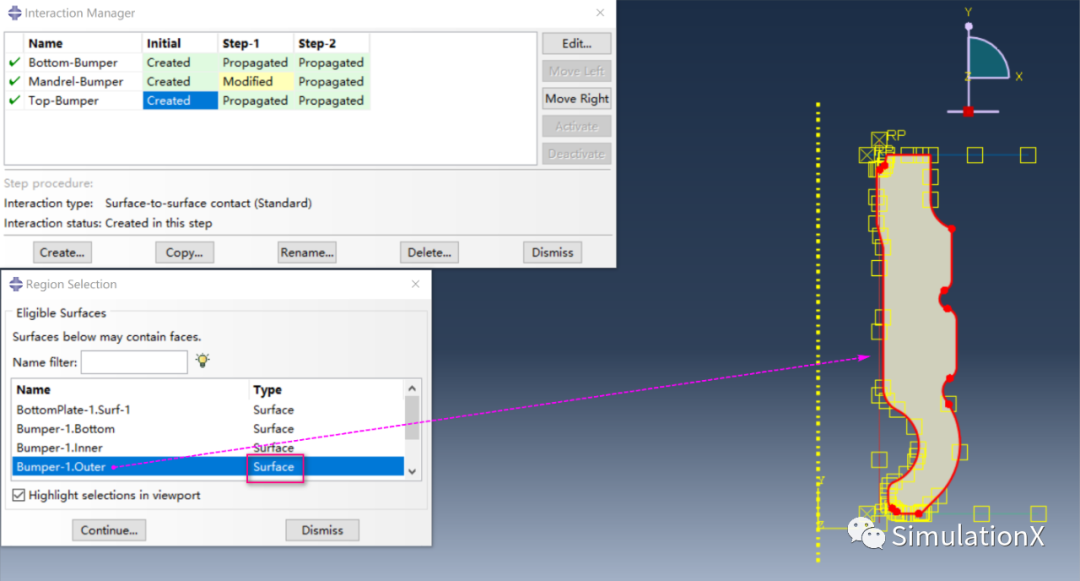
橡胶在压缩中比较难以预测谁与谁接触,其实要定义自接触也是可以对应定义接触对,只不过主从接触都是自己。自接触摩擦系数为0.08,定义在摩擦属性里面(friction2)
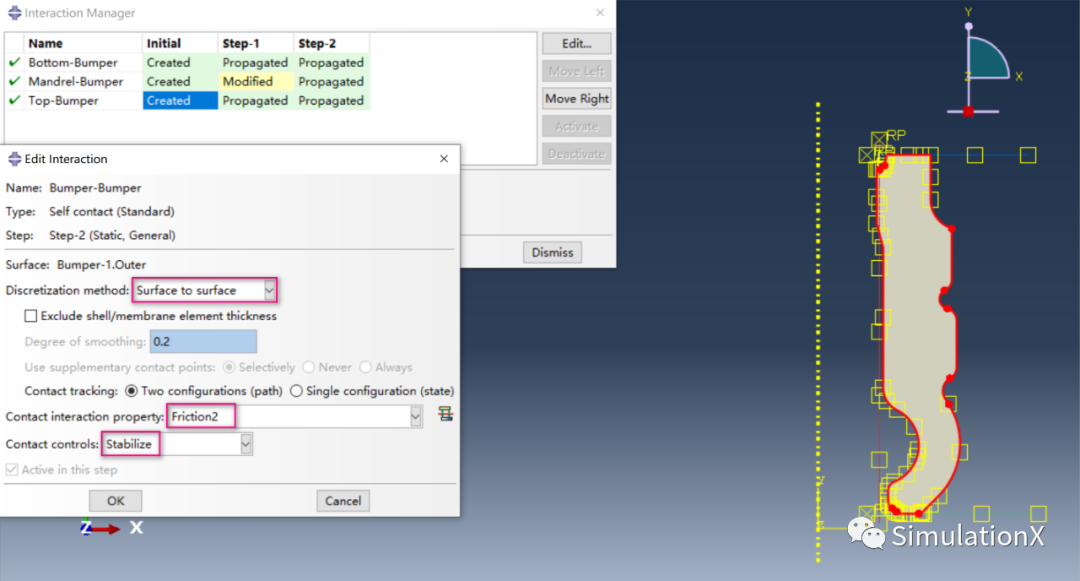
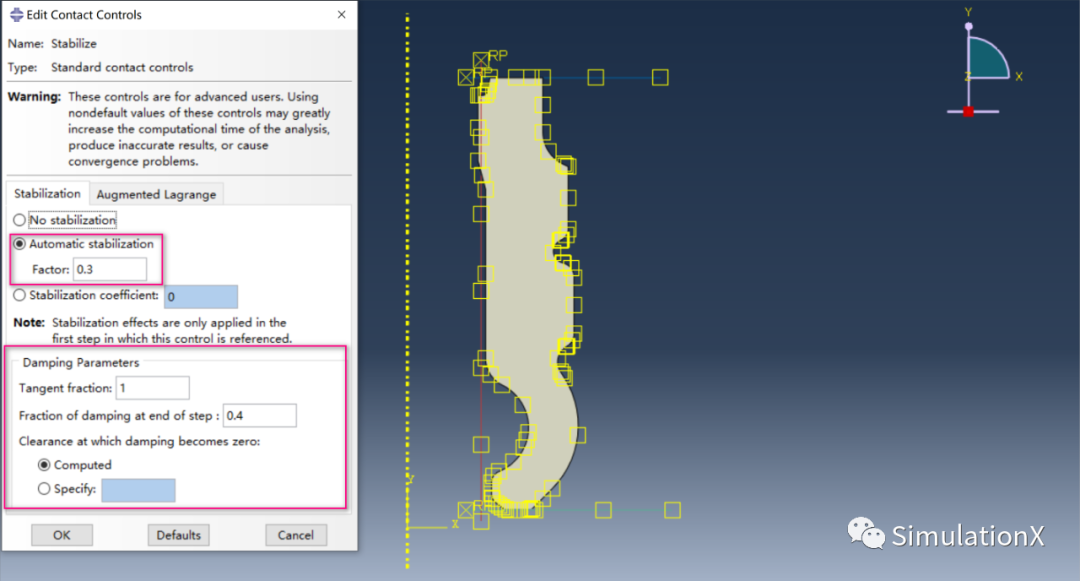
关于稳定的控制定义如下:
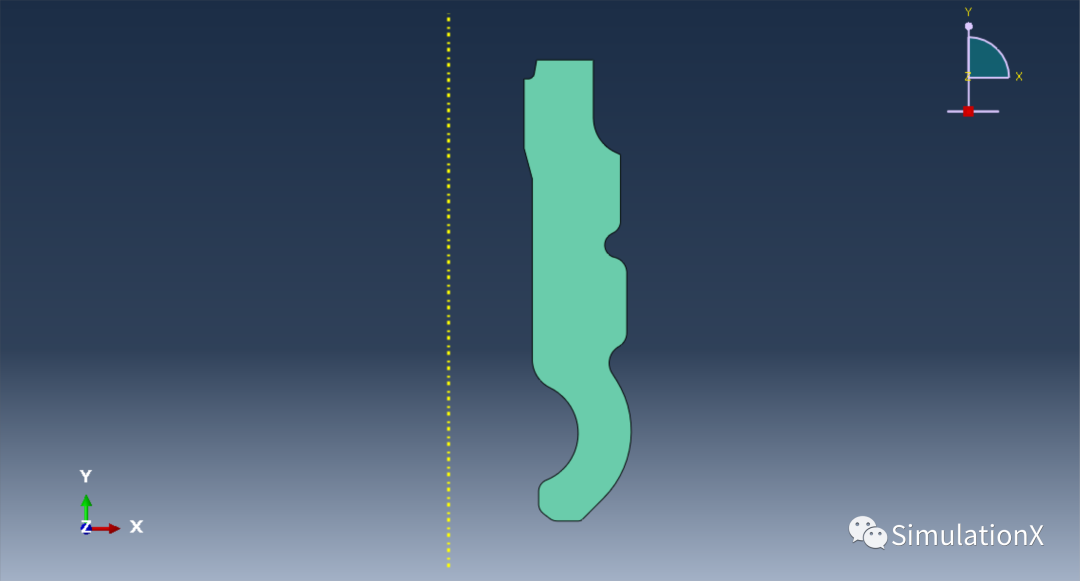
网格模组
切换至
Mesh
模组,注意网格划分与单元分配是处在同一个模组下。网格不咋滴,将就着看下
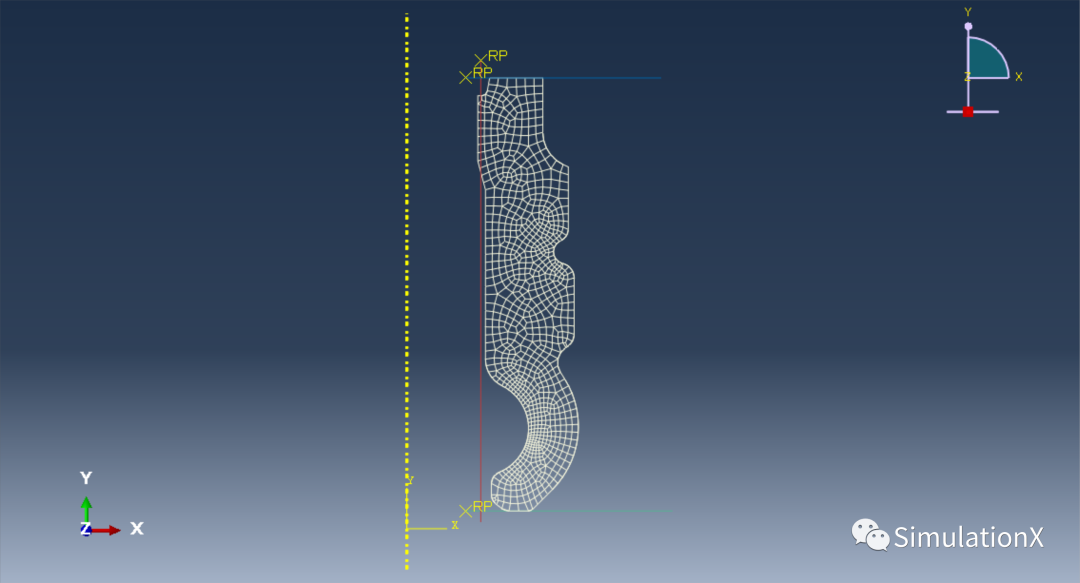
使用的单元类型为CAX4RH。
分析任务
切换至
Job
模组,新建分析任务,
直接提交即可。

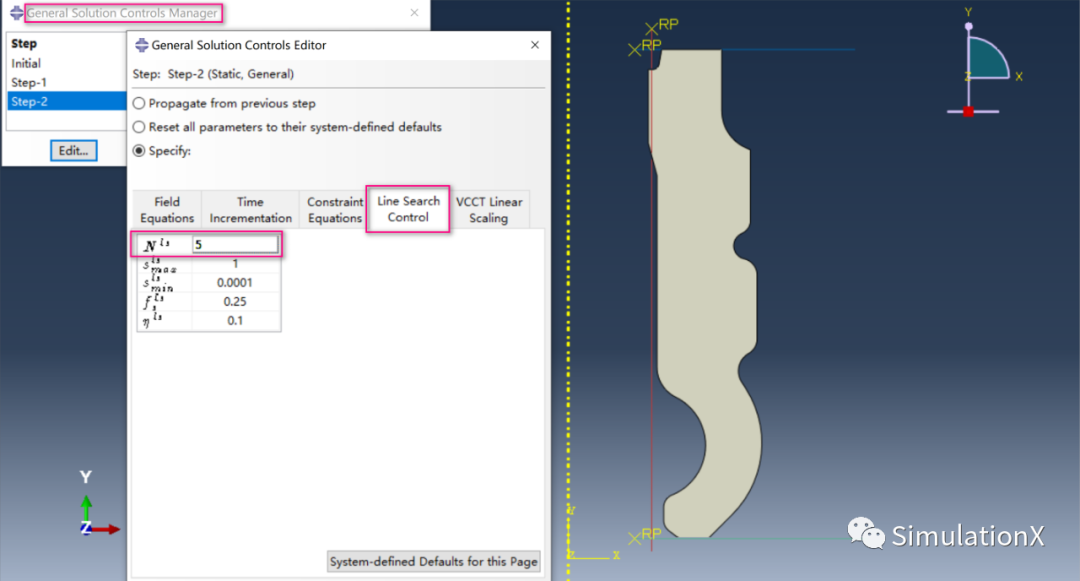
求解失败,使用软件自己的GUI诊断模块
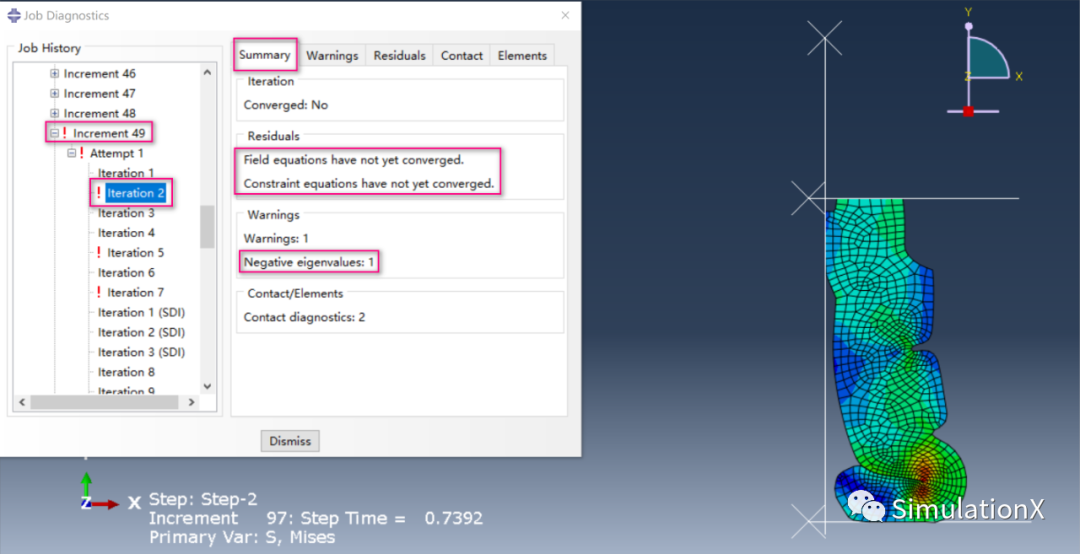
一大堆问题,软件说存在负特征值无法收敛。首先转去分析步模块,然后从从菜单栏【other】里面的通用求解控制里面进行线性搜索设置,然后重新求解
可视化模组
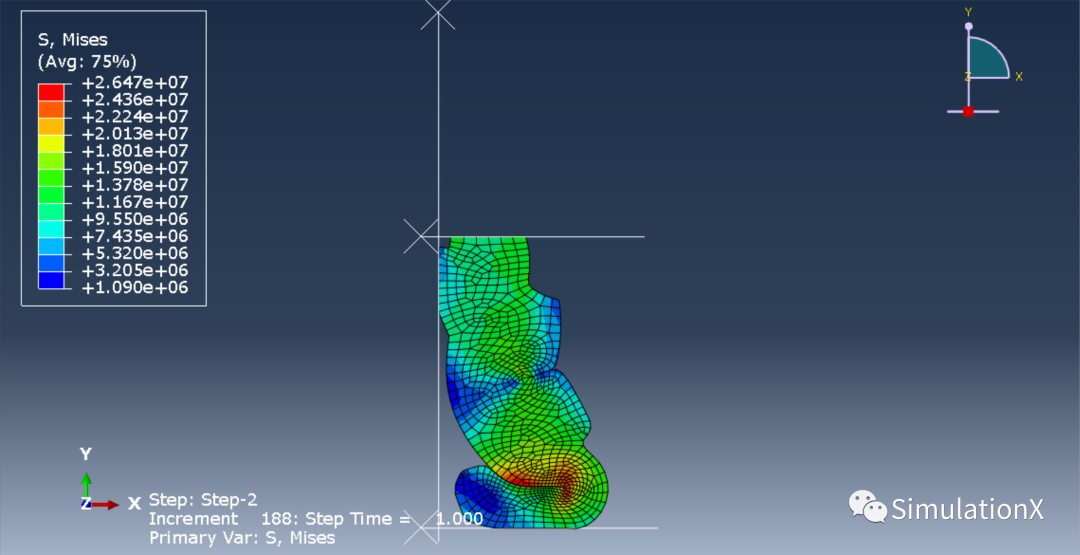
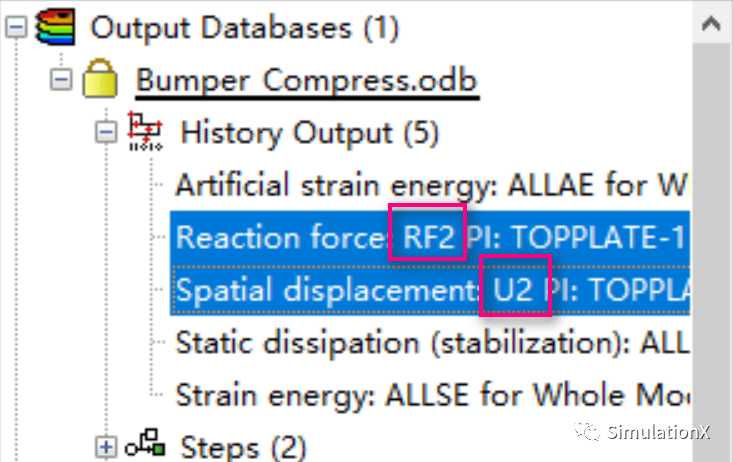
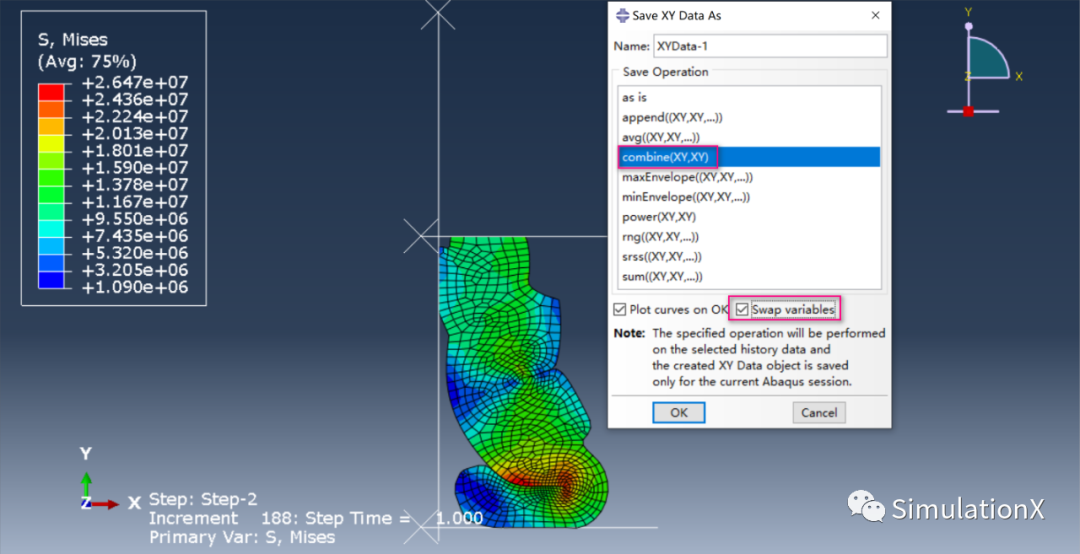
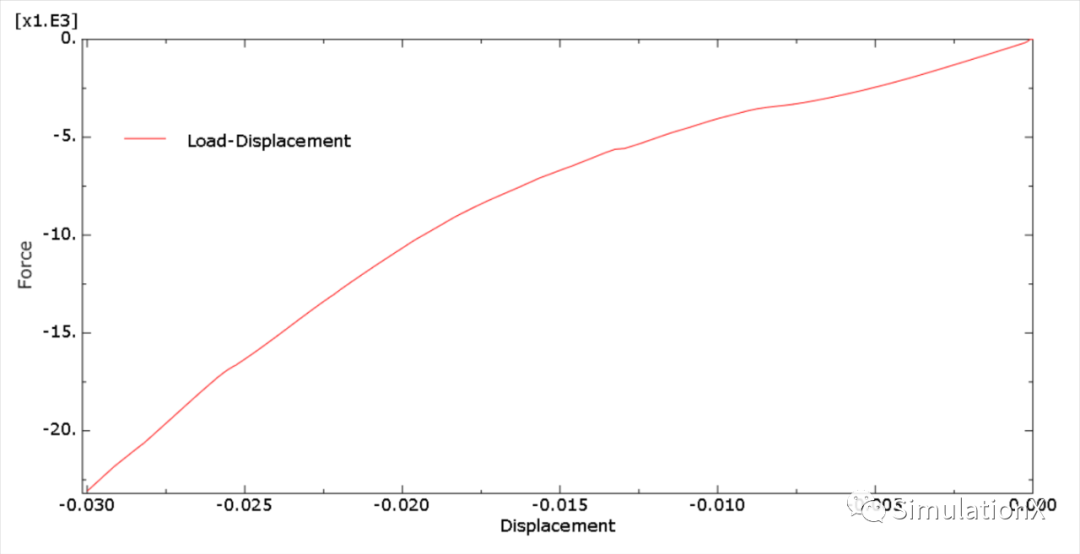
首先从历程输出里面将我们自定义请求的输出保存起来,选中以后右键Save As。软件里面多尝试右键。按照如下设置,意思是将两个曲线先存起来,然后交换位置合并
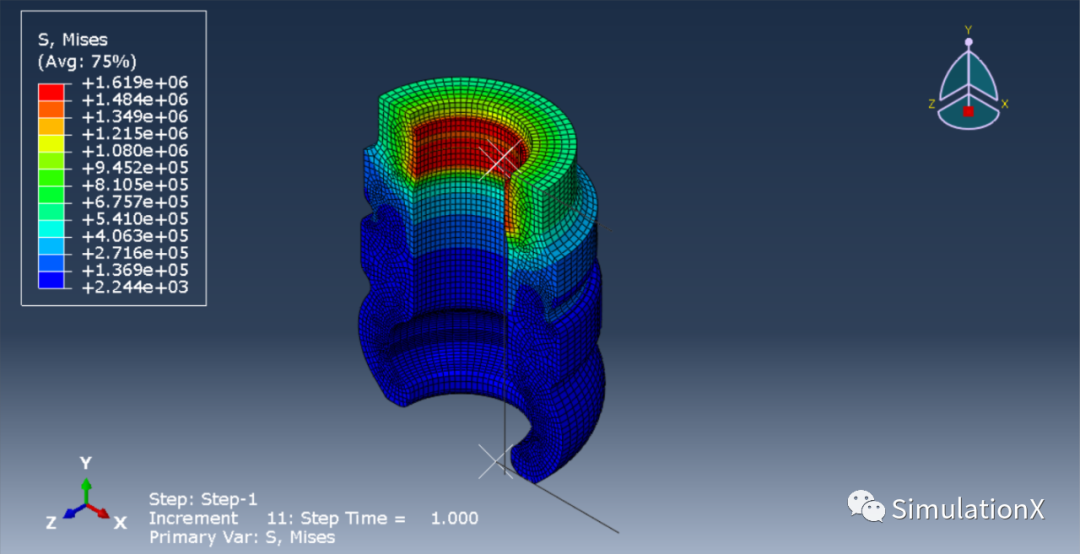
观察干涉分析可以仅仅激活第一个分析步
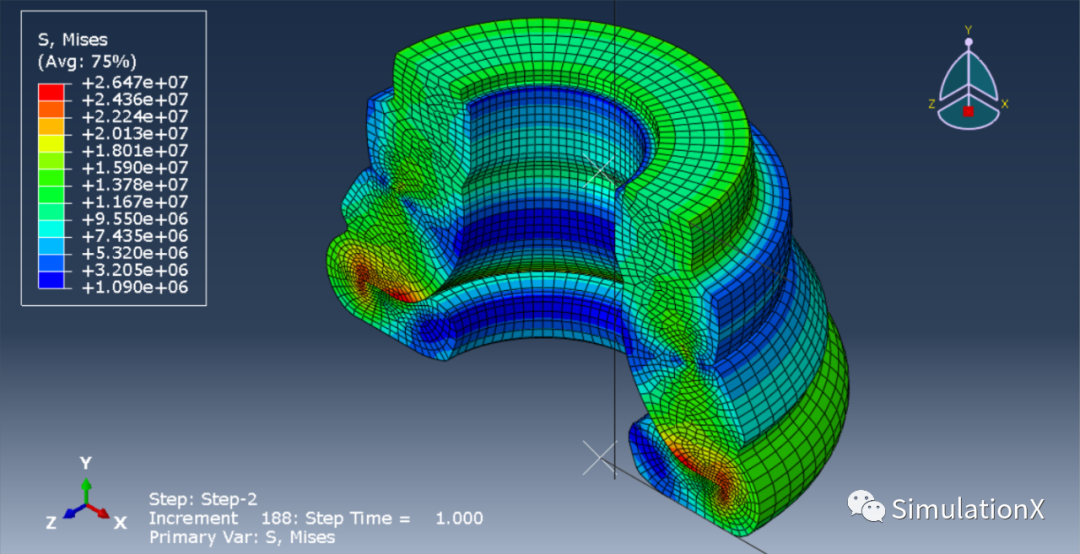
由于是轴对称,直接做成3D视效查看。上面的网格很粗糙,如果做的很精细会出现什么结果?
网格做得越精细大概率越难以收敛,畸变更严重,但也不能为了收敛放任网格那么奔放,需要结合实际到底需不需要精细化网格。故意逃避必要的网格精细化处理,你那是作弊哦!




















