Recurdyn接触特征参数含义
 2023年7月10日 14:44
2023年7月10日 14:44一般接触特征设置
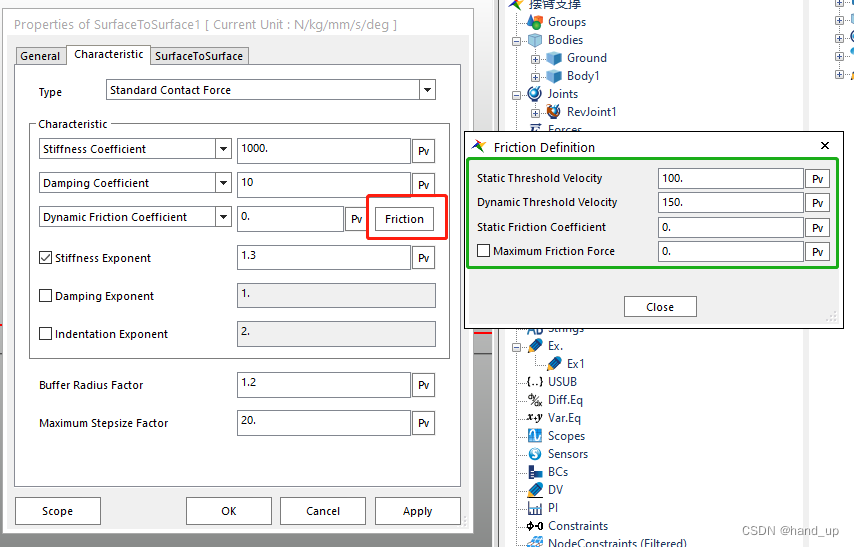
Static Threshold Velocity静态门槛速度:判断静态摩擦和动态摩擦的标准,若相对速度小于此值,摩擦为静摩擦;若相对速度大于此值,摩擦为动摩擦。静态摩擦区域内摩擦系数计算函数为
Dynamic Threshold Velocity动态门槛速度:接触对间相对速度绝对值大于此值,摩擦系数采用设定的动摩擦系数;相对速度大于静态门槛速度小于动态门槛速度时,摩擦系数计算函数为
Static Friction Coefficient静摩擦系数:静摩擦系数,计算物体由静止到运动所克服摩擦力
Maximum Friction Coefficient最大摩擦力:设定摩擦力极限值
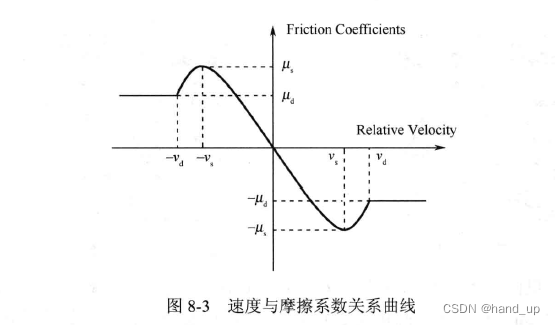
在计算摩擦力时,实际上,静滑动速度为零,但是为了避免矩阵的奇异,人为地设置了一个非0值,此外物体速度由负值变化到正值的过程中,当速度为零的瞬间,摩擦力不会瞬间由正值变为负值。所以,在滑动摩擦计算模型(Sliding Type)中,RecurDyn 利用图8-3 所示速度与摩擦系数之间的关系曲线来解决这个问题,用户可以指定静摩擦系数与动摩擦系数发生作用时的相应速度值,图 8-3 中us,ud分别表示静摩擦系数、动摩擦系数,vs、vd分别表示静滑动速度和动滑动速度。
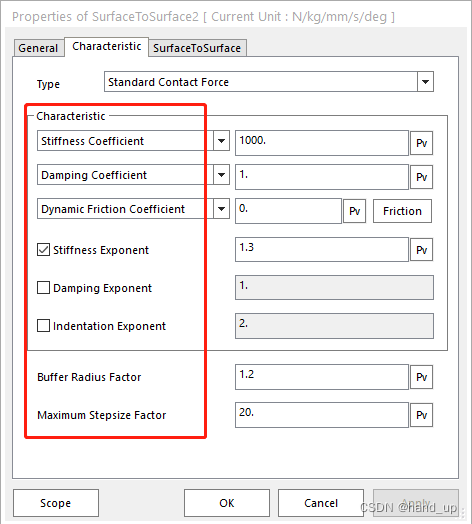
(1)Stiffiness Coefficient:用于用户指定产生法向接触力的接触刚度系数。
(2)Damping Coeficient:用于用户指定产生法向接触力的黏性阻尼系数
(3)Dynamic Friction Coefficient: 用于定义动态摩擦系数,有三个选项
Dynamic Friction Coefficient:摩擦接触过程的摩擦系数为一个常量。
Friction Force Spline:利用一个样条曲线给出相对速度和摩擦系数之间的关系。
Friction Coeficient Spline:利用一个样条曲线给出相对速度和摩擦力之间的关系
(4)Friction:用于设定静、动态门槛速度值、静态摩擦系数、最大摩擦力。
(5)Stiffnessand Damping Exponent: 通过指定不同的指数从而产生非线性的法向接触力,Stiffness Exponent所对应的指数即为法向接触力的公式中的m; Damping Exponent所对应的指数即为法向接触力的公式中的m2。
(6)Indentation Exponent (压痕指数):用于产生压痕衰减效果,当接触穿透值非常小时,计算的接触力有可能为负值,为避免这种情况,可以通过制定一个大于 的压痕指数来避免这种情况的发生,其所对应的指数即为法向接触力f的公式中的 m3。
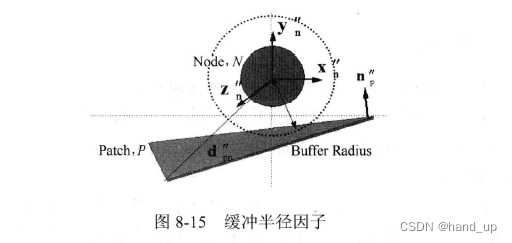
(7)Buffer Radius Factor: 缓冲半径因子,如图8-15 所示。在接触构件相互靠近,直至两者之间的距离小于缓冲半径因子与 Action Body 半径两者的乘积时,通过最大步长因子来缩减数值积分的步长值。
(8)Maximum Stepsie Factor: 最大步长因子,利用一个最大步长因子可以缩减最大步长值。
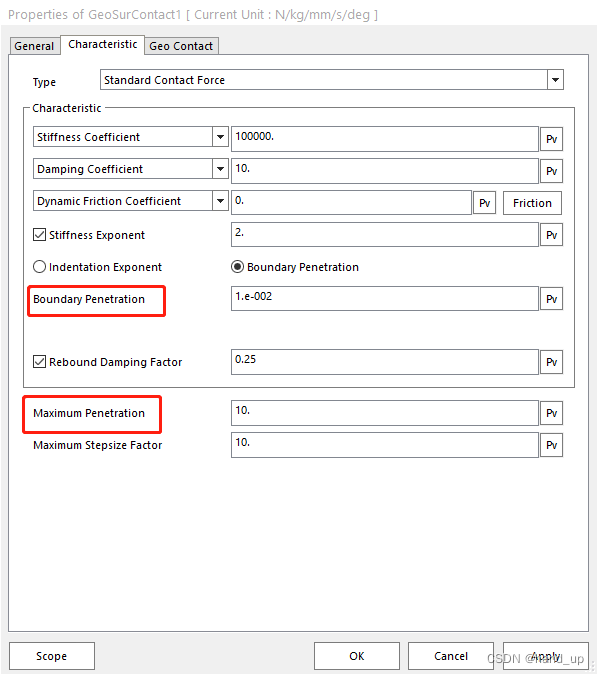
1.Boundary Pentration边界穿透:用于设定边界穿透值。原理如下
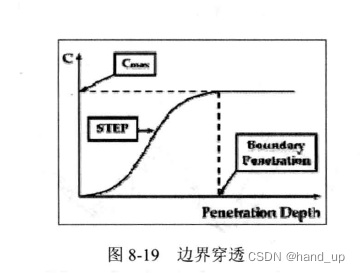
当实际穿透值小于设定边界穿透值时,阻尼系数按STEP函数计算;否则,阻尼系数为用户指定值
2.Max Penetration: 设置最大的穿透深度,当计算接触过程中,实际穿透值小于这个值时,程序计算接触力,当实际穿透值大于这个值时,程序不计算接触力,即接触穿透,这时接触失效。
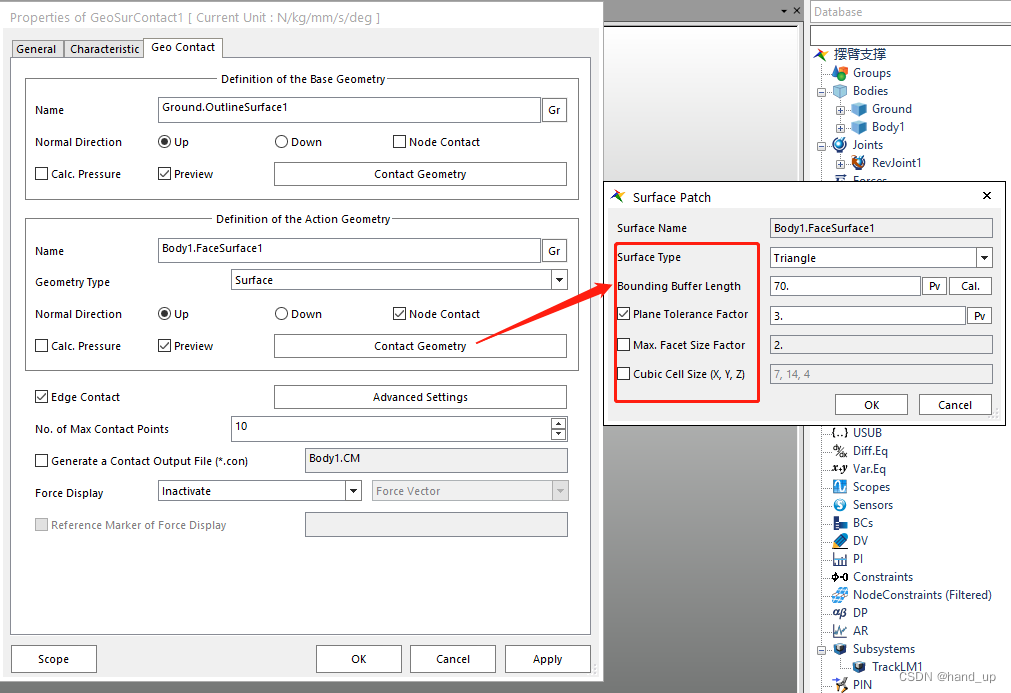
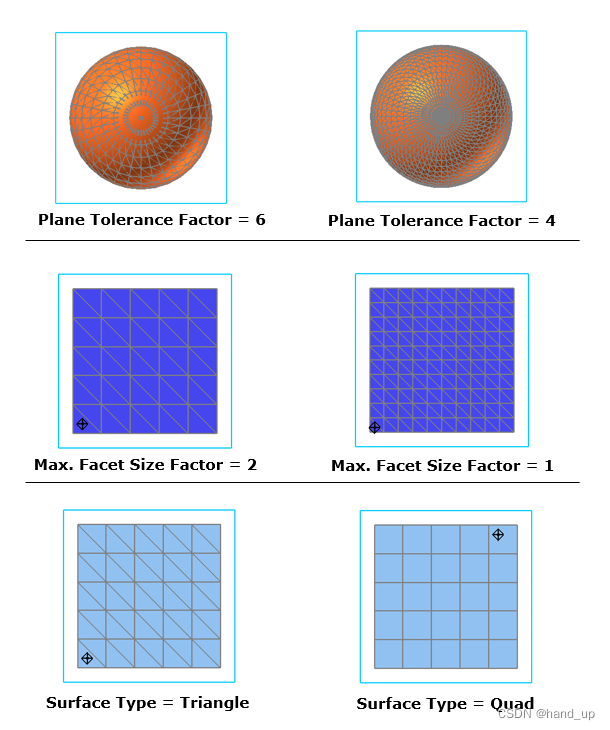
1.Surface Type曲面类型: 选择三角形切面的“三角形Triangle”或选择四边形切面的“四边形Quad”。在“三角形”类型中,接触面近似为多个三角形斑块。另一方面,在“四边形”类型中,接触面近似为多个三角形和四边形斑块。
2.Bounding Buffer Length边界缓冲区长度:该值在联系人预搜索中使用基础和动作边界框。边界缓冲区长度定义了边界框相对于实际边界框的偏移长度,如下图所示。该值是自动计算的,但可以由用户修改。此外,如果单击Cal.,该值将更新为推荐的默认值。.
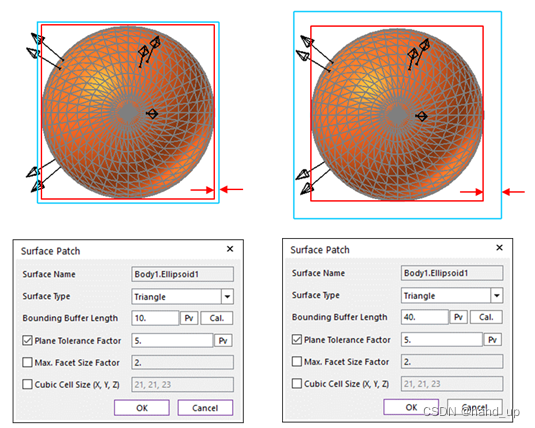
3.Plane Tolerance Factor平面公差系数: 指定表面公差系数为0.01到10之间的值。越小的值产生的补丁越精细。
4.Max. Facet Size Factor最大Facet尺寸因子: 指定最大尺寸因子为0.01到10的值。此值控制三角形或四边形补丁长度的最大值。即使是盒形几何,如果这个值被定义(选中),盒形几何也可以与大量三角形或四边形补丁一起使用,如下图所示。
5.Cubic Cell Size立方单元格大小: 显示在每个方向上划分接触边界框的立方单元格数量。该值是自动计算的,但可以由用户修改。
————————————————
版权声明:本文为CSDN博主「hand_up」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/hand_up/article/details/130903401





















工程师必备
- 项目客服
- 培训客服
- 平台客服
TOP




