Recurdyn履带问题
 2023年7月10日 15:29
2023年7月10日 15:291.问题:整车履带仿真出错,车辆越障时遇到障碍物直接弹开
思路:
关于这类模型需要调节履带和地面之间的接触参数、Bushing force,还有驱动函数。
弹飞了是因为接触刚度太大了,调小一些,在100以内继续调节,Bushing force也太大了,Rz改成0或者小一些就行,这样虽然不会弹飞,但是由于坡度问题,还是需要将你的驱动函数进行修改
2.问题:履带脱落
思路:
履带链节之间是通过力来连接的,有力的限制,一般情况下尺寸参数合适不会考虑干涉
另外Bushing Force中其实是有关于链节之间旋转角度限制的参数,Stop angle,可以防止前后履带板之间旋转角度过大而碰撞
用于搜索与链轮接触的链节的工具。有两种方式,Full Search,搜索所有的链节并与之进行接触,和Partial Search,搜索链轮附近的履带链节并与之进行接触,选用Partial Search可以减少仿真时间,但是可能会出现链轮与部分履带链节之间不发生接触导致穿透的情况,而Partial Search又可以让用户自定义搜索范围,就是User boundary」,因此如果没接触上建议先变为Full search
3.问题:履带齿与地面参数设置
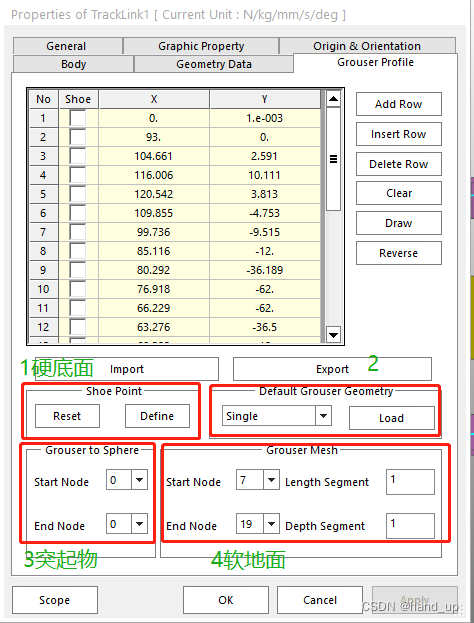
有两种类型的车辆-土壤相互作用。一种是硬地面接触,另一种是根据Bekker理论的软土壤接触。在硬地接触中需要鞋点(shoe point),在软土中需要格栅网(grouser mesh)。
另外,如果光栅与球体(grouser to sphere)的接触被定义为代表与巨石和岩石的接触,则必须选择光栅结点。
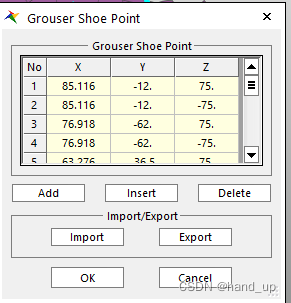
1.Shoe Point鞋点: 鞋点用于定义履带齿和硬地面之间的相互作用。这些点是通过在表格的第一列前打勾进行选择。
Reset:重置
Define:在以下对话框中修改鞋底点的位置。
2.Default Grouser Geometry默认履刺形状:有各种类型的履刺适用于不同的工作目的和地面条件,如特别设计的履刺,在软地面上具有较低的地压。在RecurDyn/Track_LM中,有单层、双层和三层的。
3.Grouser to Sphere: 埋在地下的石头等物体通常被简单地定义为一个球体。碾盘和球体之间的接触是由碾盘轮廓上的接触点定义的。如果用户定义了磨盘的起始节点和结束节点,那么两个节点之间的所有节点都会成为磨盘与球体接触的接触点。
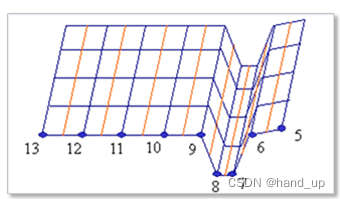
4.Grouser mesh格栅网: 当车辆在软土上运行时,用点来定义接触是不够的。因此,必须提供更多的点,以在格栅的表面形成斑块。为了实现这一目标,可以将格栅的长度和深度划分为若干段。例如,当起点节点数为5,终点节点数为13,长度段为2,深度段为4时,轨道链接光栅的网格划分如下。
4.问题:履带路面性质修改
建立其他特征路面
方法一:选择在建立路面的时候,就将路面曲线Curve绘制成自己需要的形状,然后再变成Road
方法二:在安装路径下找到文件:RecurDyn V * R * \ Toolkits \ MF tire \ Road data Files,然后将其拷贝到存储模型的同一个文件夹中,接下来单击:Ground>Road Data GRImport,选择刚刚保存的rdf文件即可
5.问题:履带装配信息
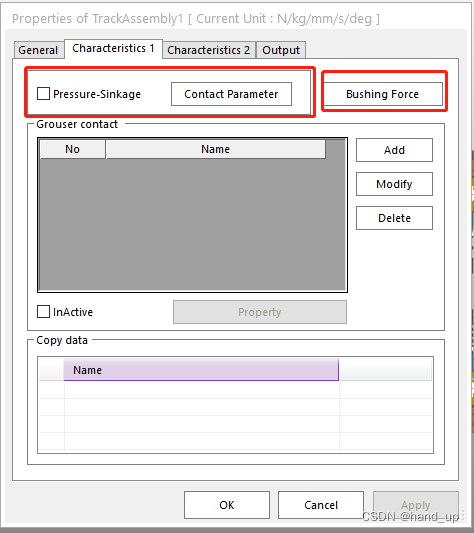
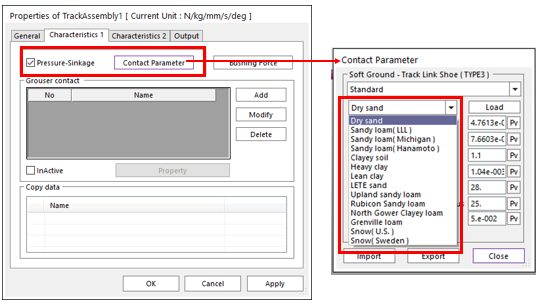
Pressure-Sinkage压力下沉:如选定,地面和履带板之间的接触参数会随着土壤条件的变化而变化
Contact Parameter接触参数:定义地面和履带板之间的接触特征值。
A:若选中“压力下沉”选项,则“土壤地面”的接触参数。
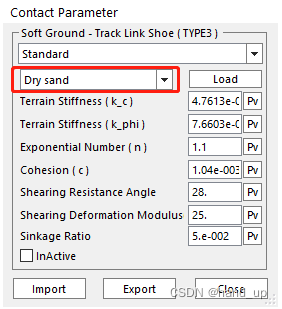
压沉关系用Bekker提出的方程描述
式中,p为压力,b为接触片的较小尺寸,即矩形接触区域的宽度,z为下沉,n,Kc,Kφ 为压力-下沉参数。
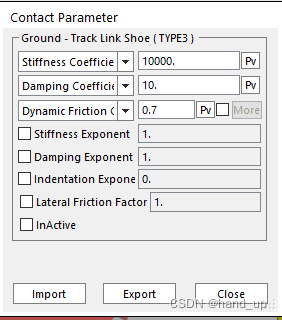
B:若未选中“压力下沉”选项,则“刚性地面”的接触参数。
Bushing Force衬套力:定义要在两个连杆之间连接的特征值,设置履带刚度。
Bushing Force是力元,旋转副是约束,这是最本质的区别;
约束是限制自由度的,力元不会限制自由度,因此用Bushing Force可以避免冗余约束,
Bushing Force可以自定义6个自由度刚度和阻尼的大小去限制物体的运动,因此可以实现旋转副的作用效果,具体什么时候用旋转副、什么时候用Bushing Force就看你结构的运动,以及是否考虑冗余约束.
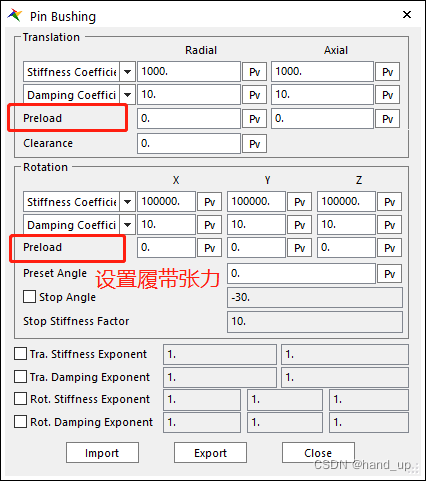
设置两个履带板之间的连接衬套所有自由度的平移和旋转的刚度和阻尼;在衬套力的轴向,通过设置preload,设置track tension(履带张力)
Grouser contact履带齿接触: 将Grouser之间的接触定义为球体到球体的接触
Copy Data复制数据:对于两个以上的履带系统,用户可以很容易地将相同的特性应用于另一个履带系统

Characteristics 2标签用来定义或修改履带接触的元素列表
履带子系统中要增加另一个托轮,创建新的车轮后,使用Navigation或List,从列表中,选择新的车轮。
使用Grouser-to-Sphere Contact,选择用来表示地面石头的球,或其它与履带接触的物体。
通过在对话框的底部勾选Initial Velocity(x-axis) of Links对话框,并在文本框中输入初始速度,设置履带的Initial Velocity。
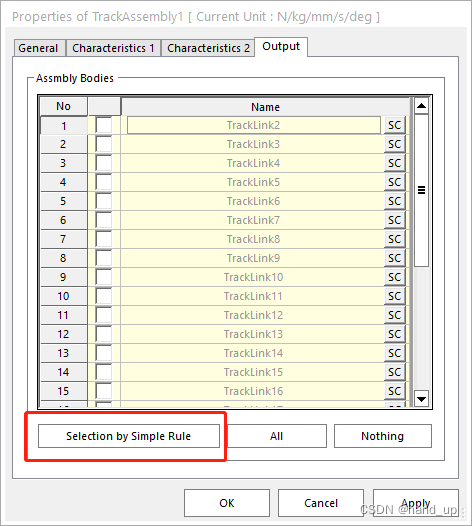
Output标签,定义输出单独链节仿的真结果
默认是从第一个链节TrackLink2,保存数据。可以手动勾选对话框,或根据编号增量,通过Selection by Simple Rule自动选择链节
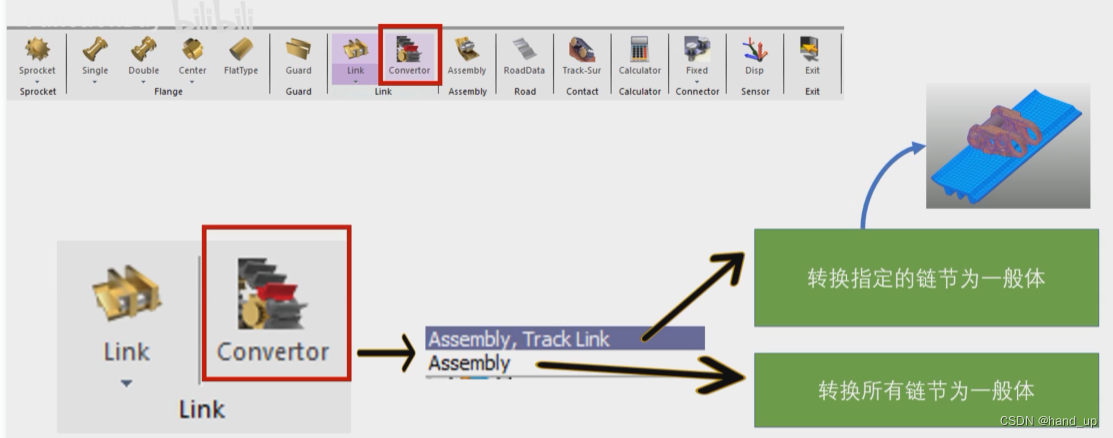
6.履带质量较轻,求解器的步长小,求解速度慢,转换为一般体。
求解步长在-7、-8次方,这是使用T-Part模型(工具包创建的履带)求解时常遇到的问题, 如果T-part的质量较轻(所谓T-part是指用于装配的体;相对应的是一般体。T-part不能柔性化),求解器的步长就会变小。履带的质量很轻,建议使用Convertor工具将履带转换为一般体进行求解。
————————————————
版权声明:本文为CSDN博主「hand_up」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/hand_up/article/details/130871729





















工程师必备
- 项目客服
- 培训客服
- 平台客服
TOP




