摘 要:可悬停扑翼飞行器模仿自然界定点滞空昆虫和鸟类的飞行特点,隐蔽性高、灵活机动、应用环境多样,具有突出的理论和实用价值,引起了世界范围的广泛关注。对可悬停扑翼飞行器的研究现状和发展方向进行了综合评述。首先总结了近年来最突出的研究成果,按照微扑翼尺寸分类分别介绍MAV、NAV、PAV尺度下可悬停扑翼微飞行器的样机构型、动力系统、质量分配与飞行性能,统计了升力、翼展、质量、扑翼幅值等重要参数,介绍了电机、压电和电磁驱动扑翼微飞行器最具代表性的研究工作;然后针对目前飞行器研究运用的升力产生原理、飞行稳定性分析、功耗效率优化、续航能力等关键技术进行了分析和总结;最后讨论了扑翼飞行器亟待突破的技术难题和未来发展方向。
关键词:
仿生;悬停;微型飞行器;机器人;微加工技术;扑翼;飞行原理
近年来,航空科学的发展极大拓宽了人们的视野,提高了人们研究飞行器的兴趣。目前主流飞行器分为固定翼飞机、旋翼机和扑翼机[
1-2
]
。固定
翼飞机是目前应用领域最广泛、研究最为成熟的机型,在民生、商业、军事、娱乐等领域发挥了巨大的作用。旋翼机利用多组螺旋桨产生的合力克服重力并提供不同方向力矩以实现自由飞行,旋翼机可以悬停的特点使其在航拍、农业、军事侦察等领域发挥出巨大的作用。扑翼飞行器(Flapping Micro Air Vehicles,FMAVs)一般由翅膀、扑翼机构、机身骨架、控制系统组成。扑翼飞行器模仿鸟类和昆虫的飞行原理,通过往复拍打翅膀获得升力以克服重力,能做到真正意义的仿生,对于解释鸟类和昆虫的飞行机理具有重大意义。在昆虫和鸟类尺度下,相比于旋翼机,扑翼运动的效率更高,灵活性更强,可以在隐蔽侦察、抵近引导攻击、狭窄空间内的搜救以及探索工作中起到重要作用
[
3-6
]
。
不同于旋翼机多电机间耦合控制,悬停扑翼飞行器的悬停功能分为有尾悬停和无尾悬停。有尾悬停方式是以仿鸟类飞行器为基础发展的,尾巴起到安定面的作用,可以提高飞行器竖直飞行时的阻力面积,从而实现悬停功能。无尾悬停模仿自然界中的昆虫或蜂鸟,实现真正意义上的仿生悬停功能,这种悬停方式往往依靠控制舵机调节尾缘或变换扑翼平面实现[
5-7]。
美国国防预先研究计划局、美国航天局是最早在微型扑翼飞行器领域上涉足的单位,并扶持美国航空环境公司研发出Nano Hummingbird仿蜂鸟无尾可悬停扑翼机器人[8]。近年来,可悬停的扑翼飞行器引起了人们的广泛重视。荷兰代尔夫特大学的DelFly Nimble[9],韩国建国大学的KUBeetle-S[10],美国普渡大学的Hummingbird Robot[11],新加坡国立大学的Nus-Robotic bird[12]均有不俗表现。
本文介绍了可悬停扑翼飞行器的国内外研究现状,并从升力产生原理、飞行稳定性分析、功耗效率优化、续航能力等方面对可悬停扑翼飞行器的关键技术进行了分析。昆虫、蜂鸟尺度下的悬停飞行是飞行器领域中的重要研究方向,其发展能极大地推动军事侦察、灾难搜救、狭窄空间探测救援等军事应用行业和民生应用行业的发展。
自然界中的扑翼飞行具有无可比拟的机动性、敏捷性和悬停能力。在过去的几十年里,工程师们受生物飞行的启发,在扑翼微型飞行器的设计方面取得了显著的进展[7]。根据翼展和机身质量,所有常见的FWAVs通常可分为微型级飞行器(Micro Air Vehicle,MAV,翼展<1 m,质量<2 kg)、纳级飞行器(Nano Air Vehicle,NAV,翼展<75 mm,质量<10 g)和皮级飞行器(Pico Air Vehicle,PAV,翼展<50 mm,质量<500 mg)[8]。MAV尺度扑翼飞行器可定点盘旋,部分能实现悬停及竖直飞行;NAV尺度基本以小型鸟类和大型昆虫作为研究对象,能实现悬停和垂直起降;PAV尺度以昆虫作为研究对象,目前可实现克服重力起飞,但距离完全自主飞行仍有较大差距。本文将根据不同尺度类别对世界上著名研究机构的扑翼飞行器进行介绍。
MAV尺度下的悬停飞行器根据翅膀布局分为八翅扑翼、四翅扑翼和双翅扑翼。多翅扑翼载荷更大,飞行时间更长,具备灵活飞行的潜力,在世界范围引起广泛关注。荷兰代尔夫特大学在2018 年模仿果蝇的飞行特点制作了一种连杆驱动四翅扑翼飞行器[9]。尽管最终的样机尺寸是果蝇的55倍,但该款飞行器可以成功模仿果蝇灵活的飞行机制。该样机质量为28 g,翼展为33 cm,翅膀长度14 cm,悬停时扑翼频率约为17 Hz,能实现7 m/s的最大速度和4 m/s的侧向飞行。如图1所示,样机由左右两套扑翼机构组成,每套扑翼机构由一个电机驱动,电机通过减速齿轮将动力输出至两个曲柄上,通过曲柄摇杆机构实现每套扑翼机构上的两个翅膀的往复运动。扑翼机通过调整翅膀拍打模式产生围绕身体三个轴的扭矩,旋转翅膀根部舵机扭转翅根可以产生偏航轴控制力矩;旋转机身顶部舵机可以改变左右扑翼中间位置,从而产生俯仰轴控制力矩;改变两侧电机转速,引起左右翅膀的升力差可以产生翻滚轴控制力矩,从而实现机身自由飞行。
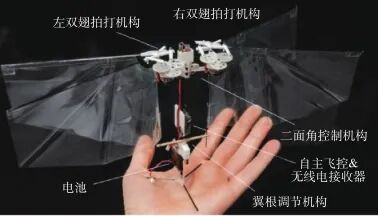
图1 代尔夫特大学研制的仿昆虫FMAV——Delfly nimble[9]Fig.1 Insect imitation FMAV developed by Delft University—Delfly nimble[9]
2020年,南洋理工大学通过模仿雨燕的飞行特点设计了X翼扑翼飞行器[13]。该飞行器质量26 g,机身长度200 mm,每个翅膀长为280 mm,采用无刷电机经过齿轮箱增加扭曲而驱动两组曲柄摇杆机构。如图2(a)所示,齿轮旋转轴采用滚珠轴承与碳纤维外壳固定,这样做可以减小轴系传动的弯曲变形从而提高无刷电机的负载扭矩和传动效率。机翼根部加入两个柔性尼龙铰链,通过储存拍打过程中的能量以补偿机翼在拍打逆转阶段减速时的动能,将机翼固定在机身上也有助于抑制扑翼引起的摇摆运动。依靠高效率的传动机构,该飞行器可通过调节尾翼的升降舵实现四翅样机的悬停、加速和空中滑翔运动。该样机可在15 Hz扑翼频率下产生近40 gf的静态推力,最大飞行速度为8 m/s,最大加速度为31.4 m/s2。
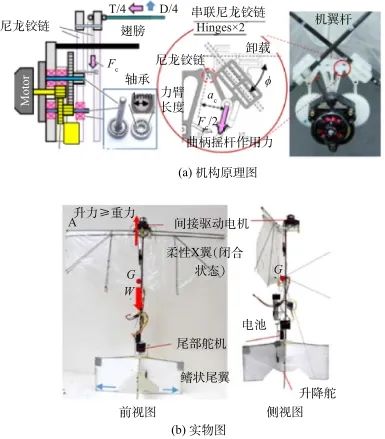
图2 仿雨燕尺寸微型扑翼飞行器[13]Fig.2 Imitation swift scale MAV[13]
新加坡国立大学在2018年设计了四翅扑翼机Nus-Robotic bird[12]。该样机采用两组曲柄滑块与滑块摇杆组合扑翼机构。无刷电机作为动力源,通过1∶20的减速齿轮箱将动力传输到输出曲柄上。每两个翅膀组成一组扑翼机构,每个翅膀可以产生90°拍打角度。如图3所示,样机通过改变左右扑翼机构的扑翼平面角度产生俯仰轴、翻滚轴、偏航轴的控制力矩,以实现完全可控飞行。该飞行器质量27 g,翼展22 cm,悬停时扑翼频率为13.3 Hz,飞行速度可达5 m/s,持续飞行时间为3.5 min,可搭载4.5 g载荷,可实现定点爆破飞行和视距外可控飞行。
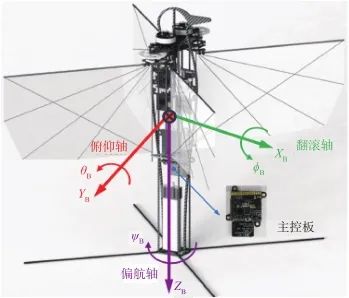
图3 新加坡国立大学四翅悬停FMAV[12]Fig.3 National University of Singapore Four Wing hover FMAV[12]
代尔夫特大学在2018年研制了一款八翅可悬停飞行器,如图4所示,采用四组扑翼机构配置,每组扑翼机构由一个电机驱动,调节四个电机的速度可以产生俯仰、翻滚、偏航轴控制力矩[14]。整机质量37.9 g,翼展28 cm,扑翼频率为15 Hz,连续飞行超过9 min,飞行速度可达3.5 m/s,八翅扑翼飞行器在向前飞行时比四旋翼样机更有效率,增加了航程和续航能力。此外,机翼表面会产生阻力可以提高减速性能。这意味着与四旋翼飞行器相比,八翅扑翼飞行器能够更快地实现减速,具备很强的实用价值。
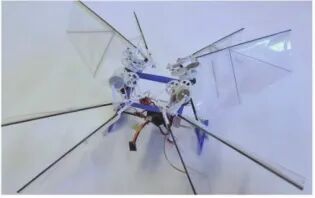
图4 代尔夫特大学八翅FMAV[14]Fig.4 Four pairs of wings FMAV, Delft University[14]
两翅扑翼飞行器相较四翅和八翅扑翼升力获取难度更大,稳定性控制难度更大,但仿生效果更好,更加具备理论研究价值。美国航空环境公司于2012年展示了一款仿蜂鸟扑翼飞行器nano-hummingbird[8]。该飞行器在设计过程中进行了翅膀形貌优化以获得更高效率,它的质量为19 g,翼展为16.5 cm,扑翼频率为30 Hz,能够悬停,能以6.7 m/s的速度向前飞行并向远程地面站传输实时彩色视频,是世界首款两翅构型的可自主飞行并实现悬停功能的无尾飞行器。翅膀的设计遵循最大升力功率比目标,以获得最优的效率,提升飞行时间,最终设计的翅膀可以达到9.4 g/W的升力功率比。扑翼机构的设计尝试了连杆机构和线传动机构的形式,考虑到连杆机构扑翼幅值有限,最终采取线传动作为扑翼机构形式,如图5所示,机构扑翼角可达200°。为了实现飞行器自由可控飞行,尝试了改变拍打攻角和翅膀变形的方式产生控制力矩,经过实验发现通过调节尾缘造成翅膀变形可以获得更大的控制力矩,最终选择采用改变尾缘的控制方式。此外,设计了齿轮组控制机构,克服了翻滚力矩与俯仰力矩控制耦合的问题。该飞行器为后续可悬停扑翼机的设计提供了设计范例。

图5 美国航空环境公司设计的纳米蜂鸟机器人[8]Fig.5 Nano Hummingbird designed by AeroVironment Inc.[8]
2015年,德克萨斯A&M大学的Coleman等尝试使用五连杆设计悬停扑翼飞行器[15]。该样机采用曲柄摇杆机构并加入第五连杆将摇杆的扑翼幅值放大,可将摇杆输出端40°的拍打角放大至120°,该样机质量为62 g,采用11.1 V电池作为动力源,由2900 kV无刷电机驱动,通过优化翅膀根部垫片宽度和垫片碳纤维叠合层数确定了垫片宽度为1.5 mm,样机如图6。三层叠合时单个翅膀可在20 Hz的扑翼频率下产生33 gf升力。样机可以22 Hz的扑翼频率克服重力,起飞上升1 m并成功悬停5 s,是已知质量最大的可悬停两翅扑翼机。
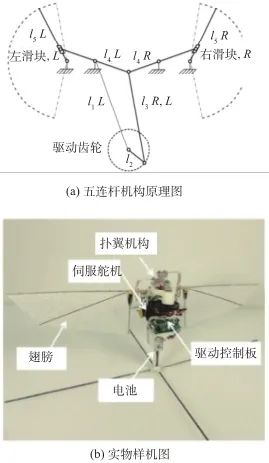
图6 德克萨斯A&M大学的MAV尺度飞行器[15].Fig.6 Texas A&M University MAV-scale aerial vehicle[15]
韩国建国大学的Jeon等在2016年设计了一种六连杆仿蜂鸟扑翼机构,并制作出样机。其设计样机质量目标为20 g,翼展目标为150 mm[16]。使用准稳态叶素理论(Unsteady Blade Element Theory)预测法估算出能够产生足够升力且适合的拍动幅度为150°,驱动频率为37 Hz。考虑到曲柄滑块机构是非对称机构,其在前进和返回行程之间有不同的速度,因此在第一级输出端添加了一组杆交叉机构,减少了曲柄滑块机构的不对称特性并放大了输出幅值,如图7(a)所示。使用多体系统动力学仿真软件对机构进行柔性多体动力学分析以分析结构可靠性。最终设计扑翼机构的质量约为8.3 g,扑翼幅值为160°,扑翼频率为23 Hz,测试得到14 gf的垂直升力,如图7(c)所示,实现了扑翼机构克服重力起飞。
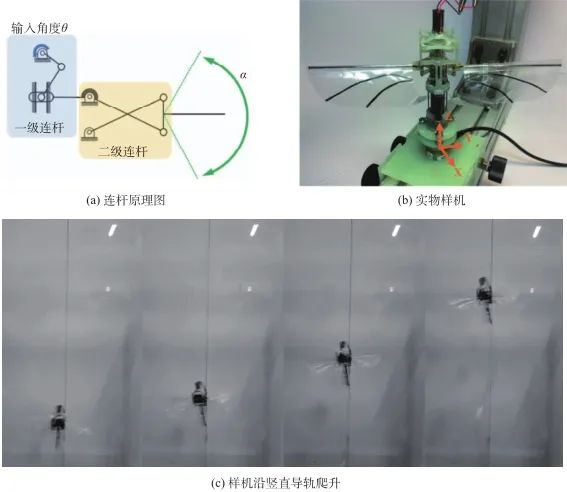
图7 韩国建国大学设计的六连杆仿昆虫FMAV[16]Fig.7 A six-link insect-like FMAV designed by Konkuk University in South Korea[16]
北京航空航天大学2020年研究独角仙的形态学和运动学特点,发现拍打翅膀的动作是由其骨骼内结构与相关肌肉的结合实现的[17]。用连杆模仿独角仙胸腔肌肉设计了二级连杆式扑翼机构。二级连杆由曲柄连杆机构和双摇杆机构组成,以曲柄摇杆机构输出摇杆的最小传动角为目标,使用仿真软件对连杆尺寸进行优化,增加了连杆机构的平稳性,减小了急回特性,实现了120°扑翼。选用1020无刷电机作为动力源,连接12∶1传动比的聚甲醛树脂材料齿轮减速箱放大扭矩,采用高强度纤维布材料作为翅膜、碳纤维棒作为翅脉制作翅膀。样机重心位于双翼气动中心轴线上,在垂直方向上的偏差0.68 mm。制作的样机翼展190 mm,质量23.1 g,在10 W功率输入下实现27.8 gf升力,成功克服重力起飞。
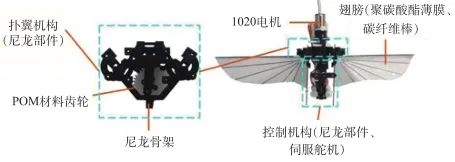
图8 北京航空航天大学仿独角仙FMAV实物图[17]Fig.8 Physical picture of FMAV imitation allomyrina dichotoma at Beihang University[17]
上海交通大学对线传动扑翼机构进行了研究,分别设计了线传动两翅和线传动四翅扑翼样机。该样机采用模块化设计方法,将扑翼飞行器划分为不同模块,从质量分配角度整理了子模块参数设计方法,完善了设计流程。利用叶素法的准稳态气动力模型分析扑翼飞行的气动力和力矩。采用多驱动器并联控制机构,降低驱动器负载,提高控制角度的幅值。对于两翅飞行器并联机构的耦合问题,利用变扑翼平面和尾缘调节的方法进行飞行控制;对于四翅飞行器的控制矩阵非线性耦合问题,利用了基于扑翼平面与扑翼频率调节的控制方法。两翅飞行器如图9(a)所示,质量为28 g,翼展21 cm,扑翼频率25 Hz,在11 W功耗下最大升力可达34 gf。可实现悬停、掌上起飞与定点回收[18]。四翅飞行器如图9(b)所示,质量为38.4 g,扑翼频率为25 Hz,翼展24.5 cm,在16 W功耗下最大升力可达50 gf,扑翼机构与机身最大摆角可呈90°,能实现机身水平状态下的垂直起飞[19]。
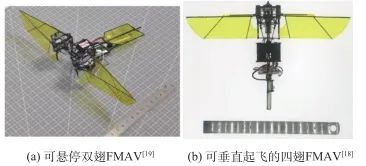
图9 上海交通大学设计的线传动FMAVFig.9 String-based FMAV designed by Shanghai Jiao Tong University
韩国建国大学在2012年模仿甲虫飞行机制设计扑翼机构,通过考虑静态力平衡,从理论上研究了重心(Gravity Center,GC)和平均气动中心(Aerodynamic Center,AC)的相对位置对垂直飞行的影响。进行了垂直起飞试验,在这些试验中,使用非定常叶素理论来确定平均AC的位置[20]。证明了通过控制重心和扑翼系统平均AC之间的相对位置,可以获得垂直起飞的俯仰被动稳定性。如图10(a)所示,2015年实现了翼展为12.5 cm、质量为7.36 g的仿昆虫扑翼微型飞行器的无控制垂直起飞。翅膀扑翼幅值为150°,扑翼频率为43 Hz。翼展为12.5 cm,使用非定常叶素理论计算和测量的三维机翼运动学,得到垂直力的平均气动力中心的位置位于翼展展向46%位置。飞行器重心的垂直和水平力的力臂几乎为零,以减小俯仰力矩[21],在43 Hz扑翼频率下可实现0.94 m/s的起飞速度。2017年,他们设计了仿甲虫两翅飞行器KUBeetle,采用曲柄连杆机构配合线传动放大机构,实现了190°扑翼角度,如图10(b)所示[22]。样机质量为21 g,在33 Hz扑翼频率下产生29 gf的升力。三个舵机分别通过调节尾缘的位置产生俯仰、滚转和偏航力矩。采用比例-微分(Proportion-Differentiation,PD)控制实现了飞行主动稳定性。实验表明该样机可以成功地进行垂直爬升,然后在0.3 m高的地面半径内悬停。如图10(c)所示,2019年他们对飞行器进一步减重,令飞行器质量达到16.8 g,翼展170 mm,高度75 mm,在23 Hz扑翼频率下产生18.5 gf的升力[10]。其提出了摆头力矩控制方案,依靠扑翼机构相对于机身的转角使升力与重力产生夹角,从而产生控制力矩,在俯仰轴转动-15°~15°范围时可产生-4.2~2.7 N·mm的控制力矩;在翻滚轴转动-15°~15°范围时可产生-2.8~2.6 N·mm的控制力矩;在偏航轴转动-20°~20°范围时可产生-0.3~0.5 N·mm的控制力矩,整机可成功悬停约3 min。2020年他们通过裁剪翅膀根部的方式减小翅膀面积,减小了阻力功耗,并且换用质量更小的舵机,3个舵机系统总质量仅1.8 g,使整机质量减小到15.8 g,飞行器翼展20 cm,传动比1∶28[23],如图10(d)所示。使用3.7 V电池作为电源,避免长时间工作时驱动电机过热,飞行器在3.7 V电压作用时产生1.34的峰值升重比。飞行测试表明,使用所选机翼的飞行器可以悬停8.8 min。
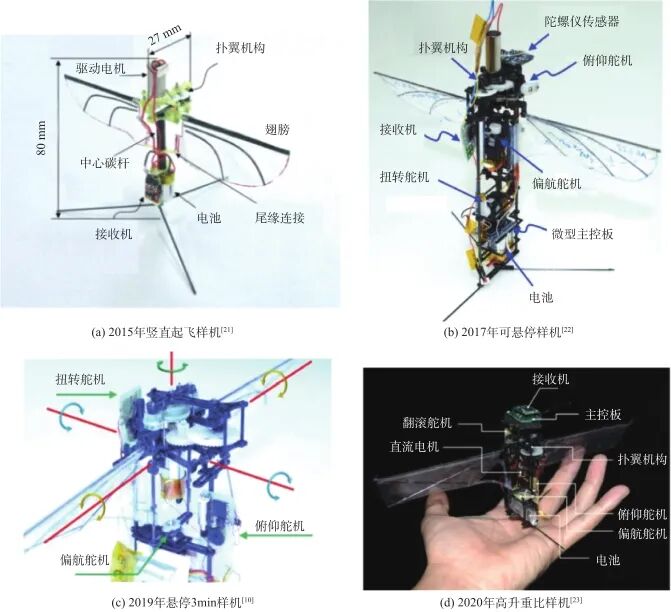
图10 韩国建国大学线传动FMAV各年份迭代版本实物图Fig.10 Figures of iterative versions of string based FMAV of Konkuk University in different years
普渡大学在2013年提出了一种电机直接驱动的扑翼翅膀的扑翼方案,机翼由直流电机直接通过齿轮传动驱动,通过电机往复运动获得扑翼角度,如图11(a)所示[24]。扑翼机构由两个电机驱动,翅膀与电机间加入一根弹簧,令扑翼过程变为二阶阻尼系统的受迫振动响应。翅膀由中间位置向两侧减速运动时,弹簧被压缩,储存能量;机翼由扑翼幅值向中间运动时,弹簧释放能量,为翅膀加速,从而节省电机功耗。调节弹簧刚度系数可以将系统固有频率与输入频率保持一致以获得最大振幅,从而获得最大升力。
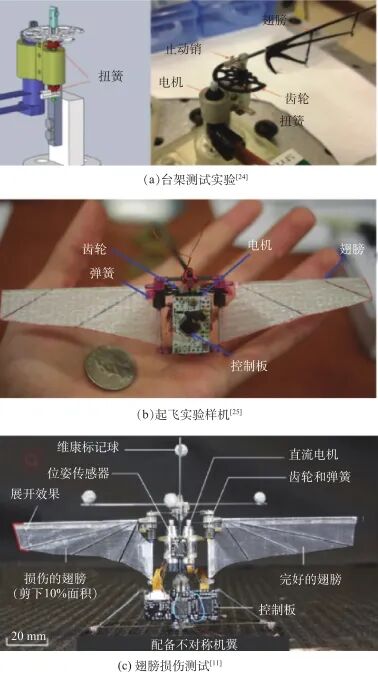
图11 普渡大学电机直驱两翅实物图Fig.11 Physical prototype of Purdue University motor direct drive two wings
2017年,他们将扑翼动力学建模为一个受迫非线性共振系统[25]。利用线性近似方法,导出了稳态扑动幅值、能量和固有频率、阻尼固有频率和峰值频率的特征频率的解析解。提出了扑动共振的理论分析,重点关注其对稳态响应、升力产生和负载功耗的影响,研究表明:扑动角速度峰值出现在系统以固有频率驱动时;最大升力出现在固有频率,而不是峰值频率;效率最大值出现在固有频率处,而不是峰值频率处。通过扑翼机构搭载翅膀进行实验,验证了模型和分析。
同年他们提出了考虑尺寸、质量和功率限制下设计电机直驱两翅扑翼样机的方法,建立了动力学、飞行稳定性和主动控制策略等理论模型,利用刚性和柔性机翼不同扑翼频率的载荷数据进行了验证[26]。如图11(b)所示,飞行器总质量12.5 g,扑翼频率40 Hz,扑翼幅值为150°,最大升力20 gf,翼展170 mm,翅膀使用两个质量2.5 g、直径6 mm的无刷直流电机驱动,翅膜使用3 μm薄的聚酯薄膜,飞行器可以克服重力起飞。
2021年他们分析自然界昆虫的翅膀能够在一定程度上对称和非对称损伤的特点,建立了翅膀破损条件下的飞行模型,如图11(c)所示[11]。从昆虫的自适应能力获得灵感,量化机翼运动学、控制力矩偏移和气动阻尼变化,在机翼完好和损坏的飞行试验中对扑翼微型飞行器的机翼损伤的影响进行了研究。与完好机翼相比,受损机翼为了补偿升力损失和扭矩失衡,导致了扑翼幅值的增大,引起功耗的相应增加。与对称情况相比,非对称损害通常需要更多的额外控制努力来实现飞行稳定。此外还分析了翅膀损伤对于升力、控制力矩和飞行动力学的影响,建立了不完全翅膀的系统控制模型。最终,扑翼机即使在单边最大升力损失约22%的情况下,也能保持飞行能力,这一结果与飞蛾悬停时处理扭矩不对称的能力(22.3±7.8%)相当。
由于NAV尺度的质量和翼展过小,现有技术很难做到完整飞行器自由悬停飞行,一些研究机构在这个尺度上做出了尝试。韩国建国大学模仿甲虫设计了微扑翼飞行器,该系统在尺寸、扑动频率和翅膀运动学方面模仿甲虫。使用了苏格兰轭机构和连杆的组合系统,将
电机的旋转运动转换为扑翼运动[27]。被动翼旋转机构通过柔性构件集成在扑翼机构中。扑翼机构由锂电池(3.7 V,180 mAh)供电,用于拍击测试,如图12所示,它可以在17 Hz的扑翼频率下产生148°的拍打角,105°的扭转角,在约束条件下的最大平均前进速度为360 mm/s。拍动试验和力的测量证实,翼的旋转显著地有助于力的产生,从而有助于产生向前的速度,并且拍动器在拍动运动期间可以产生大约2 gf的正的平均垂直力。该飞行器质量为10.26 g,翼展为12.5 cm。
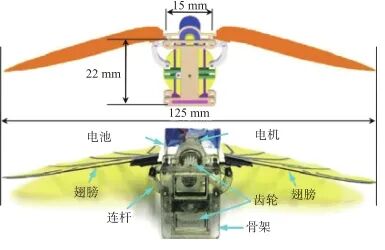
图12 三维CAD模型和扑翼机构装配图[27]Fig.12 Three dimensional CAD model and fully assembled flapper[27]
哈佛大学模仿双翅目昆虫胸部机构非线性刚度的特点设计了柔性扑翼机构[28]。这种胸腔机构由刚性板和聚酰亚胺薄膜铰链连接而成,形成一个封闭的壳体结构。它具有非线性增加的刚度,因此可以在接近末端冲程时使机翼快速减速,并随后帮助机翼反转,如图13所示。扑翼机构质量为3.51 g,翼展10 cm,扑翼幅值158°,采用连杆机构传递动力。实验表明,在25 Hz时,扑翼系统仅将总机械功率的2%消耗在惯性功率上;相比之下,当相同翅膀以相同的频率拍打时,没有弹性储能的刚体机构将总机械功率的23%消耗在惯性功率上。说明系统内部的柔性关节可以缓冲25 Hz的10 cm翼展扑翼运动的惯性功率。与刚体扑翼机构相比,由于具有弹性能量存储的能力,这种柔顺的扑翼机构在产生相同推力的情况下节省了20%~30%的功率消耗。
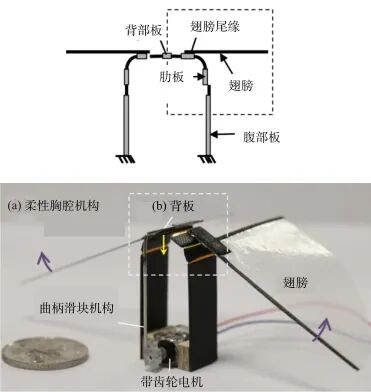
图13 哈佛大学设计的具有集成聚酰亚胺薄膜铰链的柔顺胸部机构[28]Fig.13 Compliant thoracic mechanism with integrated polyimide film hinges designed by Harvard University of Technology[28]
卡内基梅隆大学提出了一种新颖的扑翼微型飞行器的设计。两个机翼各由一个电机直接驱动,利用一个弹性元件回收能量,实现完整的弹簧阻尼系统。样机如图14所示,翅膀长度7 cm,质量2.7 g,在10 Hz时的最大升重比为1.4[29]。独立的直接驱动机翼允许系统共振并控制单个机翼的拍动角度,减少必要的功耗,并允许产生翻滚和俯仰机身扭矩。可以单独调节左右翅膀的输入角度和电压幅值以实现角度控制。
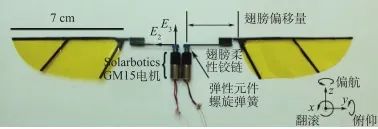
图14 卡内基梅隆大学研制的双电机直驱仿昆虫FMAV [29]。Fig.14 FMAV driven by double motors developed by Carnegie Mellon University[29]
PAV尺度飞行器往往以压电、电磁驱动为主,这类飞行器质量不大于500 mg,翼展小于50 mm,需要外接电源和升压电路以克服重力起飞。
2013年,哈佛大学的Ma等设计了“RoboBee”机器人,最早实现了压电驱动的厘米尺度微飞行器的控制飞行。为了实现飞行器的小型化,研究团队研发了专用的双晶压电驱动器,通过碳纤维与聚酰亚胺复合的柔性关节传动系统,实现了微飞行器的翻滚、俯仰、偏航多自由度飞行力矩控制。如图15(a)所示,该样机质量约80 mg,采用300 V电压交流驱动压电驱动器,通过柔性铰链传动系统,最终单个翅膀扑翼频率大概在110~120 Hz之间,整体最大可以产生大于1.3 mN的升力,且飞行功耗大概在19 mW,可以实现在监控环境下的悬停飞行,是已知可悬停扑翼微型飞行器最早的成功研究[30]。
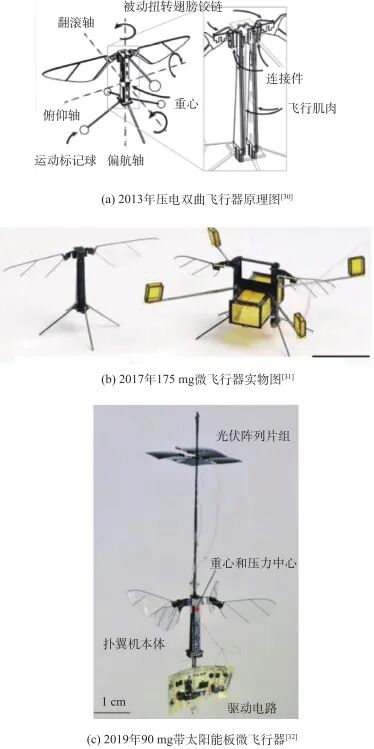
图15 哈佛大学压电PAV机构Fig.15 Harvard University piezoelectric PAV mechanism design
哈佛的研究团队在后期对微飞行器的功能拓展研究做了进一步探讨,2016年研究团队通过构建电吸附结构实现了微飞行器对于墙壁的吸附功能,这使得飞行器可以实现在特殊环境中的停留。2017年Chen等针对RoboBee的空气-水界面突破问题做了研究。研究者构建了一台质量175 mg的微飞行器,通过微型电解器实现化学蓄能,如图15(b)所示,并实现飞行器从水面到空气中的表面张力克服功能[31]。2019年Jafferis等进一步改进了RoboBee的飞行器结构,如图15(c)所示,采用太阳能供电的方式实现了微飞行器的自供能飞行任务,是迄今为止第一个实现无系绳的最轻的飞行器[32]。
南加利福尼亚大学的Yang等,在RoboBee的研究基础上研发了一种四翅微飞行器。如图16所示,研究团队采用了与RoboBee相似的传动结构,构建了一种孪生单晶压电驱动器,满足四个翅膀的相互独立驱动。当将执行器的数目从两枚增加到四枚时,对于飞行器的直接输入控制可以实现翻滚、俯仰、偏航以及升力四个输入。此外四翅结构可以抑制双扑翼结构的偏航自由度旋转扰动[33]。该样机质量约95 mg,可以实现四个扑翼翅膀的分别独立驱动,研究仍在进一步探讨控制策略以达到更高的推力比,并尝试实现更加复杂的飞行任务。
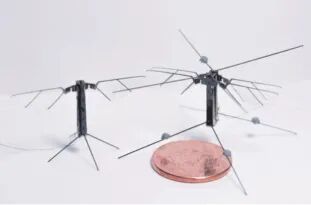
图16 南加利福尼亚大学的四翅仿蜜蜂飞行器(右)与两翅飞行器(左)对比图[33]Fig.16 Compared of the University of Southern California's four-winged bee-like aircraft (right) and two-winged aircraft (left)[33]
2016年,上海交通大学设计了国内首款压电驱动双翅扑翼微飞行器,如图17(a)所示,机器质量84 mg,翼展35 mm,在100 Hz的共振翼拍频率下,可以产生足够的推力,以约±60°的拍动振幅起飞[34]。压电驱动器的设计考虑了电气隔离和装配问题。变速器和机身被集成为一个部件,以避免装配困难。翼脉纤维方向布置合理,具有较高的强度和刚度。实验结果表明,该压电驱动器具有良好的性能;成功避免了变速器和机身之间的装配;通过合理排列碳纤维的纤维方向,获得了高性能的人造翅膀。
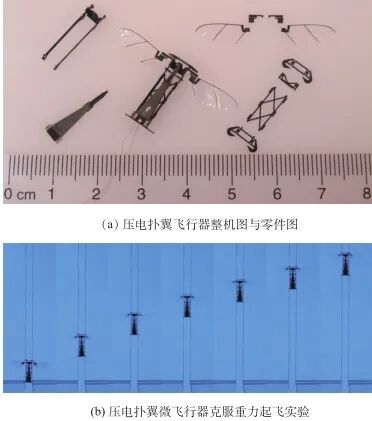
图17 上海交通大学压电扑翼微飞行器[34]Fig.17 Piezoelectric flapping wing PAV of Shanghai Jiao Tong University[34]
除了压电双晶片驱动方式驱动的微飞行器以外,例如像电磁扑翼驱动、介电弹性体驱动等方案也被来自不同研究所的研究者尝试。2016年上海交通大学Zou等提出了一种以电磁驱动为驱动方案的微飞行器,并实现了飞行器的克服重力起飞实验[35]。如图18所示,该样机质量大约在100 mg以下,扑翼拍动频率大概在80 Hz左右,可以实现约±70°的扑翼幅度,实现了世界上最小的电磁驱动扑翼机首次升空实验。为了进一步提升飞行器的抗冲击能力,哈佛大学的Chen等在2019年提出了一种以介电弹性体驱动为驱动方案的微型飞行器,这种微型飞行器使用介电弹性体作为驱动动力,可以达到约500 Hz的扑翼频率,如图19所示,功率密度为600 W/kg[36]。这种使用柔性压电材料构建的微飞行器可以达到更高的扑翼频率,从而产生更高的升力,此外柔性的驱动器使得飞行器面对冲击等问题时受到的损伤更小。
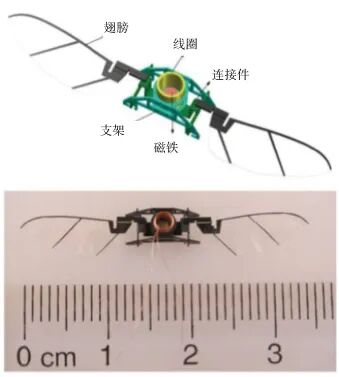
图18 扑翼机器人原型与尺子对比[35]Fig.18 Prototype flapping-wing robot contrasted with a ruler[35]
图19 由单个驱动器、两个驱动器和四个驱动器驱动的扑翼微型机器人[36]Fig.19 Image of flapping-wing microrobots driven by a single actuator, two actuators, and four actuators[36]
与传统的固定翼或旋翼飞机不同,扑翼飞行器通过往复拍打翅膀,利用不稳定的空气动力机制产生升力。这些机制包括附着前缘涡、附加质量、尾迹捕获、旋转环流和拍打-合拢机制[
37-39]。
前缘涡与扑翼展向速度相关,昆虫扑翼过程的雷诺数约为2000,在此范围内随着雷诺数的增加,前缘涡的展向速度随之增大,前缘涡可以更稳定地附着在翅膀上,从而提高扑翼飞行器的升力[40]。Ellington等[41]指出,前缘涡在机翼上表面的稳定附着是轴向流或展向流出现的结果。Maxworthy、Van Den Berg等以及Birch等[
42-44]的研究也指出了前缘涡流在扑翼过程中会稳定附着在机翼上。
附加质量又称虚拟质量[
45-46],是指机翼分别对周围空气进行加速和减速时受到反方向垂直于机翼表面的反作用力,它存在于扑翼冲程开始和结束时的加速和减速过程中。然而,由于它与循环力同时发生,这种附加质量力很难通过实验和计算方法得到[45]。可使用准定常方法,给定非时变附加质量系数来估算附加质量[47]。
拍打-合拢机制是由Weis-Fogh[48]首先发现的。其发生在冲程逆转时左右翼的相互作用中。现已证明,这种拍-合的方式可以提高许多昆虫的升力,如黄蜂、蝗虫、蝴蝶和小苍蝇[
48-51]。然而,拍打-合拢机制只有在昆虫爬升、起飞或携带重物时才能够被观测到[39]。这说明该机制虽然能够产生较大升力,但此时扑翼幅值最大反而会增加昆虫的能量消耗,所以只有在高升力场景需求下才会被使用[38]。
除了空气动力学因素,扑翼飞行在加速和减速过程中也会受到翅膀惯性的影响。许多先前的研究只分析了空气动力学,而忽略了昆虫拍打翅膀的惯性效应[52]。由于惯性的存在 [53],昆虫会以相对较高的迎角拍动翅膀[54],但这在空气动力学上是低效的[55]。此外,翅膀惯性还被认为是昆虫[56]和许多机器人扑翼[8,22]在冲程反转时被动旋转的原因。这些说明翅膀惯性对扑翼周期平均升力的贡献是微不足道的,但会消耗能量。昆虫的飞行肌肉具有弹性,可补偿扑翼过程中翅膀惯性造成的能量损耗,从而适当增加扑翼频率以提高升力[57]。这些研究说明,对扑翼升力的研究,特别是对刚性翅膀的升力研究,应该考虑机翼惯性,以便进行更精确的分析。
昆虫飞行姿态具有被动不稳定性,依靠主动控制实现自身平衡[58]。昆虫采用各种传感器,如后翅退化形成的平衡棒、眼睛和触角[
59-61]来检测姿态偏差。一项关于果蝇的实验研究表明,当平衡棒被解除时,它们会快速翻滚[62]。在没有触角鞭毛的情况下,蛾子不能保持稳定[63]。
昆虫传感器中的接收信号会激活身体控制机制,产生相应的控制力来平衡身体姿态。由于没有尾巴保持平衡,昆虫通过主动改变扫掠幅度、攻角、拍打频率、扑翼平面角度,或者通过改变姿态来改变重心的位置[
64-65]来操纵翅膀运动。例如,Dickinson等[66]对果蝇的自由飞行进行了研究,发现果蝇通过增大或减小移动拍打角度范围来重新定位平均气动力中心的位置,从而改变重心和升力中心之间的相对距离来控制俯仰力矩[66];果蝇能够操纵翅膀旋转角度实现不同的攻角(即翅膀前缘和平均行程平面之间的角度)来控制俯仰;对于翻滚控制,果蝇同时调节两个翅膀的拍打幅度和扭转角度;通过不对称地调节翅膀旋转角度或攻角来控制偏航角。对于扑翼飞行器而言,主动控制机构会增加飞行器的质量,从而增加飞行器设计的难度。四翅或更多翅膀扑翼的稳定性分析类似于旋翼飞行器,采用翅膀的速度差实现方向控制和稳定飞行。两翅飞行器模仿自然界中昆虫和鸟类的稳定性原理,在设计主动控制算法之前,添加被动稳定机构的扑翼飞行器被认为是一种替代方法。RoboBee[33]、Colibri[67]和KUBeetle[21]的早期版本采用了安定面实现被动稳定性,安定面起到空气阻尼器的作用,允许扑翼飞行器保持竖直稳定性。然而,安定面对风的扰动很敏感,降低了飞行器的机动性。为了增加微型扑翼飞行器的灵活性,需要加入主动控制算法。在NAV尺度下,哈佛大学的研究人员考虑了许多方法,如使用外部运动捕捉相机、板载传感器、陀螺仪、磁力计[
69-71]和生物激励触角[61]等。在无法获得直接角速度反馈的运动捕捉系统上,首先使用基于修正李亚普诺夫函数的类PD控制律稳定RoboBee飞行器。Fuller等提出了一种基于实验和无模型控制策略的多输入多输出控制器[69],采用自适应控制方法可以提高飞行稳定性,减小制造缺陷引起的模型误差。普渡大学采用线性二次调节方法对扑翼运动进行控制,利用线性二次型调节器(Linear Quadratic Regulator,LQR)分别跟踪120°和150°的扑翼运动。结果表明,虽然LQR不能实现精确的相位跟踪,但它能够以更大的幅度和更少的功耗实现扑翼运动,这更好地满足了MAV的设计要求[24]。上海交通大学设计了自抗扰控制器,可实现飞行器在未建模下的悬停,建立了三位速度感知系统,可感知并抑制风的扰动。试验结果表明,飞行器无扰动悬停时控制高度均方根为2.53 cm,有扰动前飞时可控制高度飞行,其均方根误差为2.78 cm[68]。
PAV微型扑翼飞行器通常只拥有两个压电双晶片作为驱动源,为了实现微型扑翼飞行器的自由飞行控制,提出了专门的力矩控制方案。普通飞行器的飞行控制需要满足升力、翻滚力矩、俯仰力矩以及偏航力矩四个参数的控制。对于微飞行器而言,通过控制左右两驱动器的运动幅度可以调整飞行器的翻滚力矩;而改变翅膀的拍打同步偏移可以调整飞行器的俯仰力矩;偏航力矩的产生需要依靠上下冲程保持不同扇动速度实现控制,这种控制方法通常被称为微飞行器的劈裂控制,将完整的正弦拍打运动转换为两个不同频率的半周期翅膀拍打运动。最终微型飞行器将通过四个参数的调整,完成飞行姿态的控制任务。
MAV尺度的飞行器可以产生足够的升力来携带商业上可用的电源和电子组件,使它们能够实现自主飞行。美国航空环境公司的纳米蜂鸟是第一种可以使用机载控制系统[8]进行控制飞行的无尾飞行器。定制设计的主控板包含一个单MCU,一个三轴MEMS陀螺仪,一个接收器,电源调节器和驱动器电路,质量只有0.65 g。韩国建国大学开发的KUBeetle使用非集成形式的传感器组件,可在飞行中保持悬停,这些组件包括一个微控制器和一个ATmega328P微处理器,一个三轴MEMS陀螺仪,2.4 GHz Deltang公司生产的DT-Rx35接收器。他们使用三个旋转舵机分别控制飞行器翻滚、俯仰和偏航。通过控制舵机摆角改变飞行器的尾缘,调节扑翼翼根使左右翅膀的攻角发生变化,从而产生控制力矩。
扑翼时,翅膀在拍打开始时加速,在拍打结束时减速。惯性力是保守力,因此在扑翼过程中不存在克服惯性力的净能量转移。然而,由于在高频扑翼过程中系统缺乏能量转换机制,系统中高速波动的力可能会增加飞行能耗[72]。昆虫可以通过在飞行肌肉[73]、胸部和翅膀铰链[74]中储存弹性能量,并形成一个共振系统来抵消循环中较小的力,从而克服这个问题。在扑动机构中,增加弹簧以利用弹性储能是能量转换最简单、最常用的方法之一。Lau等在2014年制作了电机驱动曲柄滑块机构并在扑翼机构中加入了弹簧,建立了静态理论模型,设置了电机的功率和升力实验对理论进行了验证[75]。Baek等[76]进行了电机驱动曲柄滑块扑翼机构柔性系统的无量纲分析,分析了电机特性、曲柄滑块的运动参数和气动载荷对电机转速和直流电机的输入输出功率的影响。Madangopal等[77]通过仿真表明,在带有曲柄摇杆机构的设计中加入弹簧,可使电机转矩变化减小56.32%,最大转矩减少12%。Tantanawat等[78]通过数值研究表明,在四杆扑动机构中增加弹簧可使峰值输入功率降低42%。
扑翼过程中存在扑翼机构和翅膀的惯性功耗以及摩擦和电机内阻引起的发热功耗,可利用理论模型和实机测试的办法计算各部分功耗,进而采取合适的优化方法提高扑翼动作的效率,增加飞行器飞行时间。Yang等[79]和Jeon等[80]指出,摩擦损失可以成为估计扑动机构性能的主要因素。研究还表明,摩擦损失在输入功率中占相当大的比例,这可能与在小型拍打机构中超过惯性负荷所需的功率成正比[75,81]。Campolo等于2014年设计了双电机直驱扑翼机构,利用电机的电阻和机械损耗、转子的惯性负载以及气动载荷建立了二阶阻尼模型[82]。Khan等[81]推导了由曲柄驱动的四杆连杆机构的运动学方程,利用叶素法理论对机翼惯性和气动载荷建模,研究了机翼刚度和惯量对平均扑动频率、升力和气动功率的影响。Park等[83]对摩擦力建模,可以预测不同运行条件下的系统损耗和功率需求。同时在机翼铰链上增加弹簧,证明了弹性元件的加入可以通过减小系统的内力来减少系统的摩擦损失。
续航能力是扑翼机器人的重要性能指标。优化机翼设计性使阻力最小化,可提高扑翼效率和飞行时长[84]。可以通过优化扑翼机构、针对电机性能设计升力功率比最佳的翅膀、根据翅膀升力选择容量质量比最佳的电池、减小摩擦损耗来实现飞行的可持续性。
很多研究机构也在提高续航能力上进行了研究。韩国建国大学通过减小飞行器质量、剪裁翅膀尺寸以减小空气阻力,制作的KUBeetle-S的大小与自然界中的蜂鸟相似,可以在空中盘旋约8.8 min[23];德克萨斯A&M大学开发的62 g机器人蜂鸟,比纳米蜂鸟重三倍多,由于电机过热,飞行持续时间不到1 min[15];同样由于电机过热,Colibri只能滞空几十秒[67]。四翅飞行器的续航性能普遍优于两翅飞行器,有四个串联机翼的TechJet蜻蜓可以持续飞行大约8~10min;Delfly Nimble采用X翼布局,显示出优异的机动性[9],它可以悬停5 min,向前、向后和侧向飞行,并像果蝇一样进行倾斜转弯、360°翻转和快速爬升;NUS-Robotic-bird四翅飞行器使用X翼配置可以在机载视觉系统[12]的情况下待机3.5 min,并根据需要快速向任何方向飞行。代尔夫特大学八翅飞行器带有四对扑翼。可以在室内和室外环境下进行飞行[14],具有约9 min的高飞行续航能力。
近年来,随着驱动技术、能源技术的发展,可悬停扑翼飞行器的载荷能力、续航能力有了长足的提升,已经在实验室条件下取得了很大进展。
本文针对可悬停扑翼飞行器的不同尺度,分别从MAV、NAV、PAV尺度下介绍了可悬停扑翼飞行器的国内外研究现状,并对悬停扑翼飞行器升力产生原理、飞行稳定性分析、功耗效率优化和续航能力等关键技术进行了讨论。
目前的研究表明:PAV尺度下可悬停扑翼飞行器的自由飞行仍然是一个具有挑战性的课题。而MAV、NAV尺度下的可悬停扑翼飞行器仍然需要在飞行续航能力上有所改进,以显示它们相对于类似尺寸的传统旋翼飞机的优越性。目前,电机驱动的MAV尺度下的悬停扑翼飞行器在敏捷飞行能力方面取得了巨大成就,展现出广阔的应用前景。因此,从事FWAVs研究的人员可能需要更多地关注具体的研究,如推力增强、效率、阵风/侧翼响应、降噪和避开障碍物的敏捷机动性。研究增加其他运动模式,如跳跃、行走、游泳和爬行,通过完全模仿自然界昆虫的策略可以激发扑翼飞行器的应用潜力。相信随着可悬停FWAVs的发展,其独特的应用价值会得到更多的体现。
 2023年9月27日 10:26
2023年9月27日 10:26
























