BMW行驶动力学
行驶动力学
在某些行驶动力的作用下车身本身产生运动,这些运动可以分为三种表现出来。
为此可以建立一个坐标系,该坐标系利用其三个坐标轴表示车辆自由度。

• 纵向动力学
主移动方向或行驶方向通过坐标系的 x 轴或纵轴表示。纵向动力学行驶状态(例如加速或制动)会导致车辆俯仰,即车辆围绕 y轴运动。
• 横向动力学
横向动力学是指车辆在 y 轴或横轴方向移动,例如转向过程中或避让绕行时。这种情况会引起车辆围绕 x 轴运动,即车辆发生侧倾。
• 垂直动力学
垂直动力学是指车身在 z 轴或垂直轴方向运动,这种运动称为车身上下移动,例如在颠簸路面上行驶时。围绕车辆的 z 轴或垂直轴运动时称为偏转。
这类运动在不足转向或过度转向时出现,例如以运动方式驾驶车辆时通过漂移表现出来。
这些行驶动力学基本特性主要取决于以下车辆设计尺寸。

重心在车辆中的位置和重心与路面之间的距离,轴距以及轮距是影响车辆行驶动力学特性的关键性几何参数。
车轮上的作用力车轮与路面之间接触面上出现的作用力也分为三个主方向。
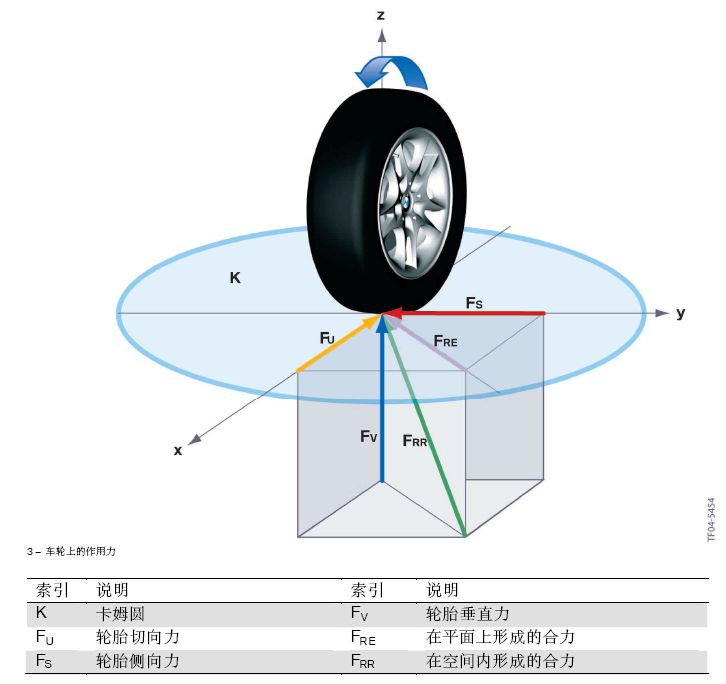
垂直力是基础。该作用力与路面垂直,相当于车轮负荷。垂直力与附着系数 μ 的乘积等于可传递的最大轮胎侧向力和切向力。卡姆圆半径以图形方式表示了这种数学关系。
此外,在卡姆圆上还可以看到切向力与侧向力之间的关系。
在此以示例方式解释卡姆圆的含义:
如果轮胎侧向力作用在车轮上,那么沿纵向产生的制动力或加速力(轮胎切向力)最多只能在达到最大总作用力(平面内的合力)时为止。
达到最大总作用力时车轮抱死或打滑。
相反,制动时只能达到有限的侧向力(轮胎侧向力)。如果超过这个限值,车轮就会沿横向侧滑。这种情况会导致车辆甩尾。
如果施加制动力,那么可以产生的最大侧向力取决于卡姆圆半径。同样,车辆直线行驶时也可以产生最大制动力或最大加速力(也取决于该半径)。
这种相互关系表明,转弯行驶时每次快速加速或紧急制动都可能导致车辆甩尾,因为车轮上用于加速或制动的任何纵向力都必然会导致轮胎侧向力降低。
卡姆圆半径取决于轮胎与路面之间的附着系数,即取决于轮胎、道路表面和路面状态。例如,路面潮湿时该直径明显小于路面干燥时。
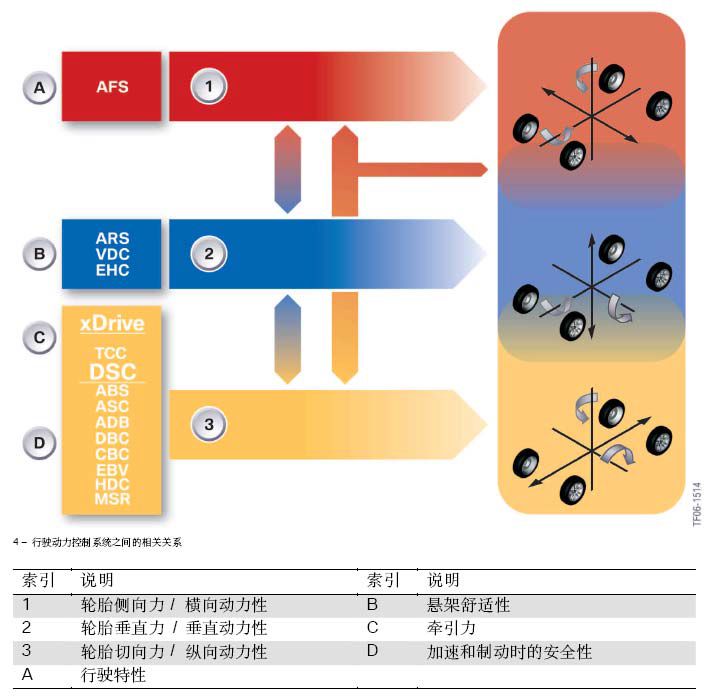
行驶动态管理系统之间的相互关系现代行驶动态管理系统的作用仅以轮胎与路面之间的相互关系为基础。为确保有效分配和区分多个不同系统,我们将在三个单独的系统中详细介绍:
• 纵向动态管理系统
以下行驶动态管理系统影响车轮切向力:
− DSC
− EMF
− DCC
− XDrive
− DPC
这些系统影响 x 方向上的平移(纵向移动)和围绕 y 轴的转动(旋转运动)。
• 横向动态管理系统
车轮侧向力主要由转向角产生,就是说主要受前桥上的助力转向系统或主动转向系统影响。
这种最重要的影响以围绕 z 轴转动的方式表现出来。
− Servotronic
− AFS
− EPS
• 垂直动态管理系统车轮垂直力和车轮支撑力主要受以下系统的影响:
− EHC
− ARS
− EDC/EDC-K
− VDC
影响包括 z 方向上的平移,对 ARS 来说包括围绕 x 轴的转动,对 EHC 来说包括围绕 y轴的转动。此外,由于车轮支撑力的变化,ARS也会影响围绕 z 轴的转动(稳定杆本身对行驶动态的影响)。
其相互关系的复杂性以及轮胎作用力和车轮运动之间的相互影响参见以下图。